Star Adventurer
Für den mobilen Einsatz ist eine Vielzahl an Montierungen verfügbar. Meine Motivation bestand darin eine leichte Reisemontierung für den astrofotografischen Einsatz zu finden, die meinen Anforderungen genügen sollte. Sowohl von den Herstellern, als auch von engagierten Amateuren sind reichhaltige Information u.a. im Netz verfügbar [1,2]. Der hier vorliegende Artikel ist ist in einer ausführlichen Version in [12] zu finden. Er beschreibt den Umbau des Star Adventurer in ein mobiles System mit Nachführkontrolle in zwei Achsen.
Designkriterien
- Eine leicht bedienbare Einstellung der Poljustage. Justierschrauben, die nach erfolgter Justage fixiert werden können stellen eine Erleichterung gegenüber einem einfachen Panoramakopf dar.
- Tragfähigkeit maximal 5 kg Masse in kompakter Form (DSLR mit Vollformat-Chip mit einem 200 mm F/2,8 Teleobjektiv oder sogar eine kleine Teleskopoptik oder eine kleineren CCD-Kamera mit Filterrad und Teleobjektiv.
- Transportfähigkeit. Fluggepäcktauglich im Rahmen eines Familienurlaubes (Masse um 10 kg). Rucksacktransportfähigkeit!
- Antrieb. Absolut verlässliche Nachführung. Alle Einzelaufnahmen sollen frei von Nachführfehlern sein. Ovale Sterne sind nicht zulässig.
- Guidingfähigkeit. Das System soll eine Anschlussmöglichkeit für einen Autoguider besitzen. Darüber hinaus soll auch eine motorische Korrektur in Deklination möglich sein. Damit ist Guiding in beiden Achsen gefordert.
- Stativ leicht und kleines Packmaß.
- Stromversorgung: Sie soll möglichst leicht sein. Hier findet sich ein Adapter der QC 2.0 Powerbanks auf 12 V „umstellt“.
Autoguider
Für den Autoguiders wurden im Wesentlichen folgende Kriterien für die Auswahl herangezogen:
- Einsatz als „Stand-Alone“ Autoguider. Das Gerät soll ohne zusätzliches Notebook einsetzbar sein.
- Er soll über Sub-Pixel Genauigkeit verfügen.
- Das System soll Dithering beherrschen.
- Das Konzept für das Gesamtystem ist, dass die optischen Achsen von Kamera und Guidingkamera fest zueinander parallel ausgerichtet sind. Dann muss immer sofort mindestens ein Leitstern im Sichtfeld des Autoguiders sein, damit das zeitaufwendige Suchen des Leitsternes entfällt. Daraus ergibt sich, dass die Guidingkamera über ausreichend hohe Empfindlichkeit verfügen muss, um immer einen Leitstern zu finden.
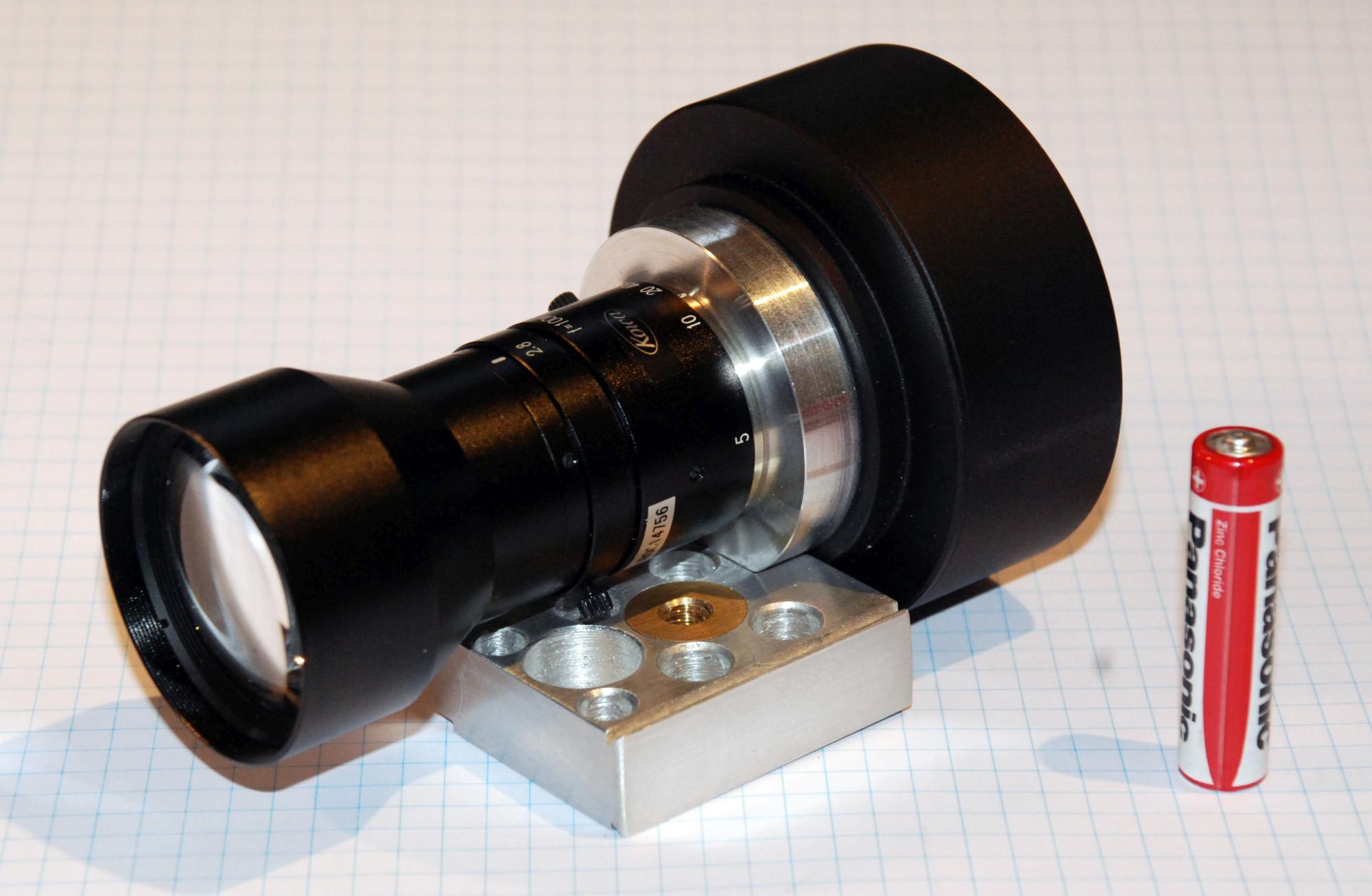
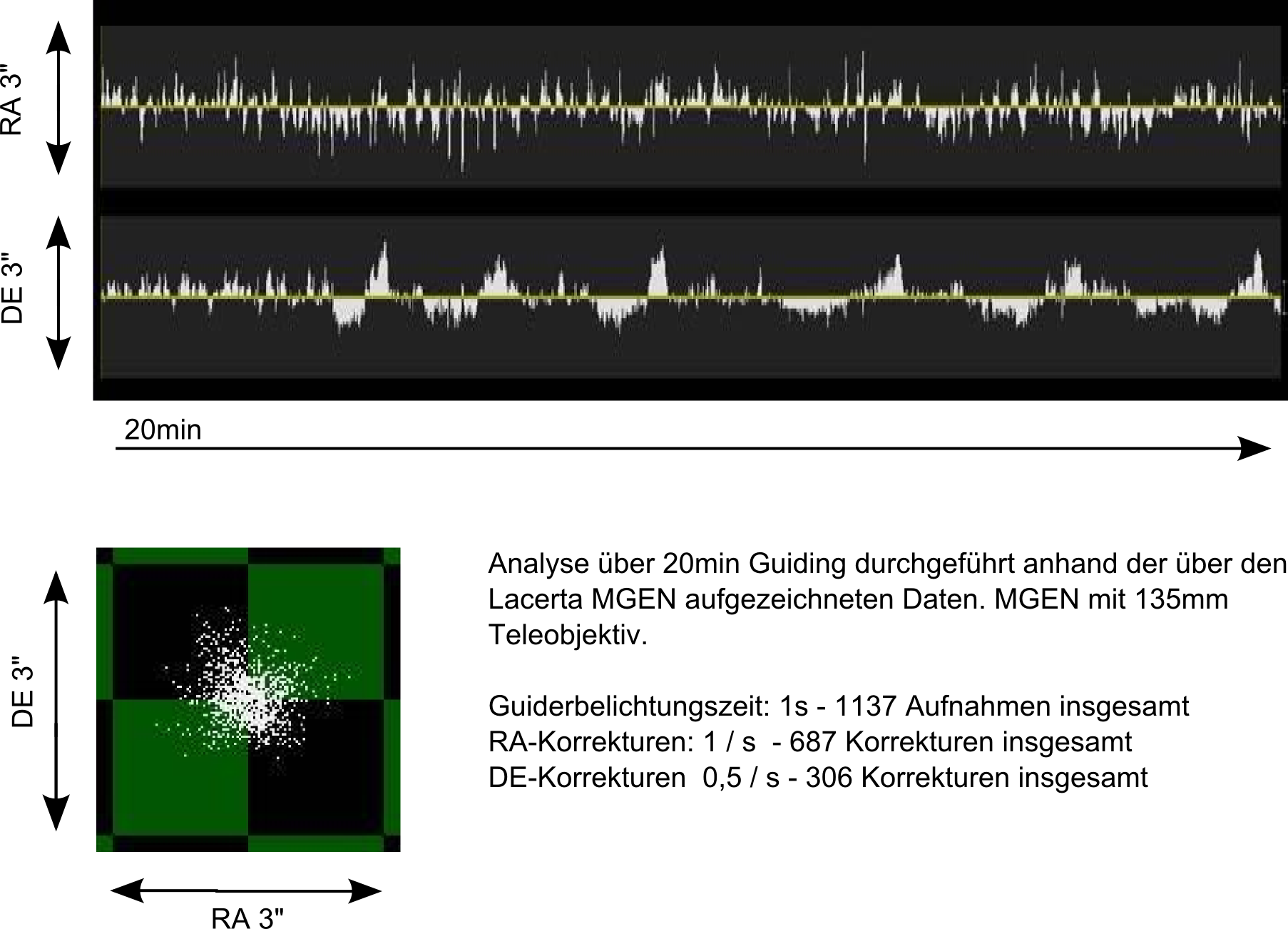
Die Wahl des Autoguiders fiel letztlich auf den Lacerta MGEN mit T2 Anschluss. Dessen Kamera wird mittels einen maßgefertigten C-Mount Adapters mit einem Kowa 100 mm f/2,8 Objektiv verbunden. Der Adapter ist mit einem Aluminiumblock mit Gewichstssparbohrungen fest verbunden. Dieser dient zur Befestigung des Guiders. Der Block selbst nimmt auch noch einen Leuchtpunktsucher auf. Die erzielten Nachführgenauigkeiten wurden im Rahmen eines Tests ermittelt. Die Ergebnisse sind weiter unten zu finden. Die Genauigkeiten des Gesamtsystem liegen weit über dem erforderlichen Maß und stellen somit keien Einschränkung für die Qualität der Nachführung dar.
Aufbau
Der Skywatcher Star Adventurer ist in seinem Lieferzustand bereits in der RA-Achse autoguiderfähig. Inspiriert durch das Angebot einer Firma aus Österreich [5], die einen motorischen DE-Antrieb anbot, wurde ein Konzept formuliert die motorische DE-Steuerung im Selbstbau nachzurüsten. Die wesentlichen Gründe für den Selbstbau waren:
- Voller Durchgriff auf Aspekte der Motorsteuerung: Schrittweiten, Mikroschritte und Geschwindigkeiten. Damit besteht volle Flexibilität bzgl. der Auswahl des Motortyps und die Möglichkeit ggf. vorhandenes Getriebespiel auf elektronischem Wege zu kompensieren.
- Vermeidung von unnötigen Kabel- oder Steckverbindungen und der Einsatz von zuverlässigen Verbindern. Ansatz war es hier sämtliche Elektronik in einer Box zusammenzufassen und dadurch möglichst wenige „schwebende“ Verdrahtung zuzulassen.
Die Motorsteuerung wurde auf einem Arduino nano Clone realisiert.
Einsatz des Star Adventurer

Das abgebildete System hat so wie es hier zu sehen ist, eine Masse von 6,5 kg. Für den praktischen Einsatz kommen noch einige Kabel, Autoguider, Handbox und die Stromquelle dazu. Somit kommt man unter 7 kg Gesamtmasse aus.
Das System erfüllt meine Erwartungen vollständig. Die Standfestigkeit im Sand kann verbessert werden, ist aber auch im jetzigen Zustand noch akzeptabel. Der Star Adventurer in Verbindung mit der Smartphone-App [11] ist blitzschnell aufgebaut. deswegen stelle ich manchmal lieber schnell das Reisesystem raus, anstatt mein auch nur etwas größeres Hauptsystem aufzubauen.
Für den MGEN habe ich inzwischen eine Halterung zur Steckbefestigung am Stativ angefertigt. Mehr Informationen dazu gibt es hier.
Literatur
[1] www.skypixels.at/downloads/Reisemontierungen.ppsx
[2] Sky at Night Magazine, April 2012
[3] www.project-nightflight.net/DSLR_astrophotography_with_Astrotrac.pdf
[4] www.astrotrac.com
[5] www.astronomieforum.at/viewtopic.php?f=35&t=8239
[6] …
[7] …
[8] forum.astronomie.de: Lin_guider_auf_Raspberry
[9] http://sourceforge.net/projects/linguider/files
[10] U. Teschke, Astrofotografie im Lichte des Ruhrgebiets, SuW 01/2011
[11] Tech Head, SmartPhone App Polarfinder, Google Play
[12] Die Himmelpolizey 44, 10/2015, AVL Astronomische Vereinigung Lilithal e.V., Seiten 4-11