Funktion der Star Adventurer Motorsteuerung
Bei der eingesetzten Software handelt es sich um eine Entwicklung auf Basis einer freien Fokussteuerung [forum.astronomie.de]. Die Star Adventurer Motorsteuerung verwendet das dort implementierte Robofocus Protokoll und wurde für den DE-Antrieb angepasst. Die Hauptroutine wurde um eine (nahezu) echtzeitfähige Abfrage von zwei I/O Pins ergänzt. Damit können die DE+ bzw. DE- Signale eines ST4-Ports direkt in Steuerimpulse des Motors umgesetzt werden. Eine entsprechende Logik überwacht die Richtungen der Korrekturen und kompensiert ggf. das Getriebespiel.
Als Schrittmotortreiber wird ein handelsübliches Modul (DRV8825) eingesetzt. Alle Parameter der Steuerung werden über die serielle Schnittstelle des Arduinos programmiert. Ist das einmalige Set-Up beendet, werden die Werte im EEPROM des Arduinos nichtflüchtig gespeichert. Damit ist die Steuerung immer sofort nach dem Einschalten betriebsbereit. Die einzustellenden Parameter der Steuerung sind die Schrittmotorparameter und die Größe des Spiels im DE-Getriebe. Zum weiteren Betrieb des Systems ist nach dem Set-Up kein Notebook mehr erforderlich. Der kommentierte und hoffentlich halbwegs nachvollziehbare Arduino Sketch findet sich hier.
Schaltung
Die Schaltung der Box ergibt sich eigentlich geradewegs aus der Dokumentation der DRV8825 Baugruppe. In Verbindung mit den Pinzuordnungen in dem Arduino-Sketch könnte man sich das alles „zusammenfieseln“. Die Abbildung zeigt den kompletten Schaltplan der Elektronik-Box. Auf die Darstellung der von mir verwendeten RJ-45 Anschlussbuchse für den Schrittmotor und die Buchse für die Spannungsversorgung der DSLR habe ich verzichtet. Diese Anschlüsse habe ich nur generisch eingezeichnet. Die kann man je nach den individuellen Wünschen und Möglichkeiten gestalten.
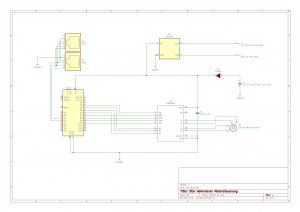
Die ST4-Ports sind hingegen als Quasistandard festgelegt. Daher müssen diese natürlich in der hier gezeichneten Art mit RJ-12 Buchsen ausgeführt werden. Bei der hier verwendeten Verschaltung muss man etwas mehr Löten, man könnte die eine oder andere Lötstelle sparen. So hat man aber den Vorteil, dass es später egal ist welchen Stecker man in welche der beiden Buchsen steckt. Das ist im Dunkeln ein unschätzbarer Vorteil…
Hardware
Der verwendete NEMA14 Motor hat eine Schrittweite von 1,8° und ein Planetengetriebe mit einer 1:26 Untersetzung. Damit steht unter allen Betriebsbedingungen ein ausreichendes Drehmoment zur Verfügung. Die Motorparameter wurden so gewählt, dass die resultierende Korrekturgeschwindigkeit 1,3 arcsec pro Sekunde beträgt. Das entspricht ungefähr der Korrekturgeschwindigkeit des Star Adventurers in RA-Richtung. Das Spiel im Antriebsstrang liegt ungefähr bei 10 Halbschritten. Dieser Wert wurde im EEPROM abgelegt und wird in der Steuerung bei Richtungsumkehr der DE-Korrektur berücksichtigt.
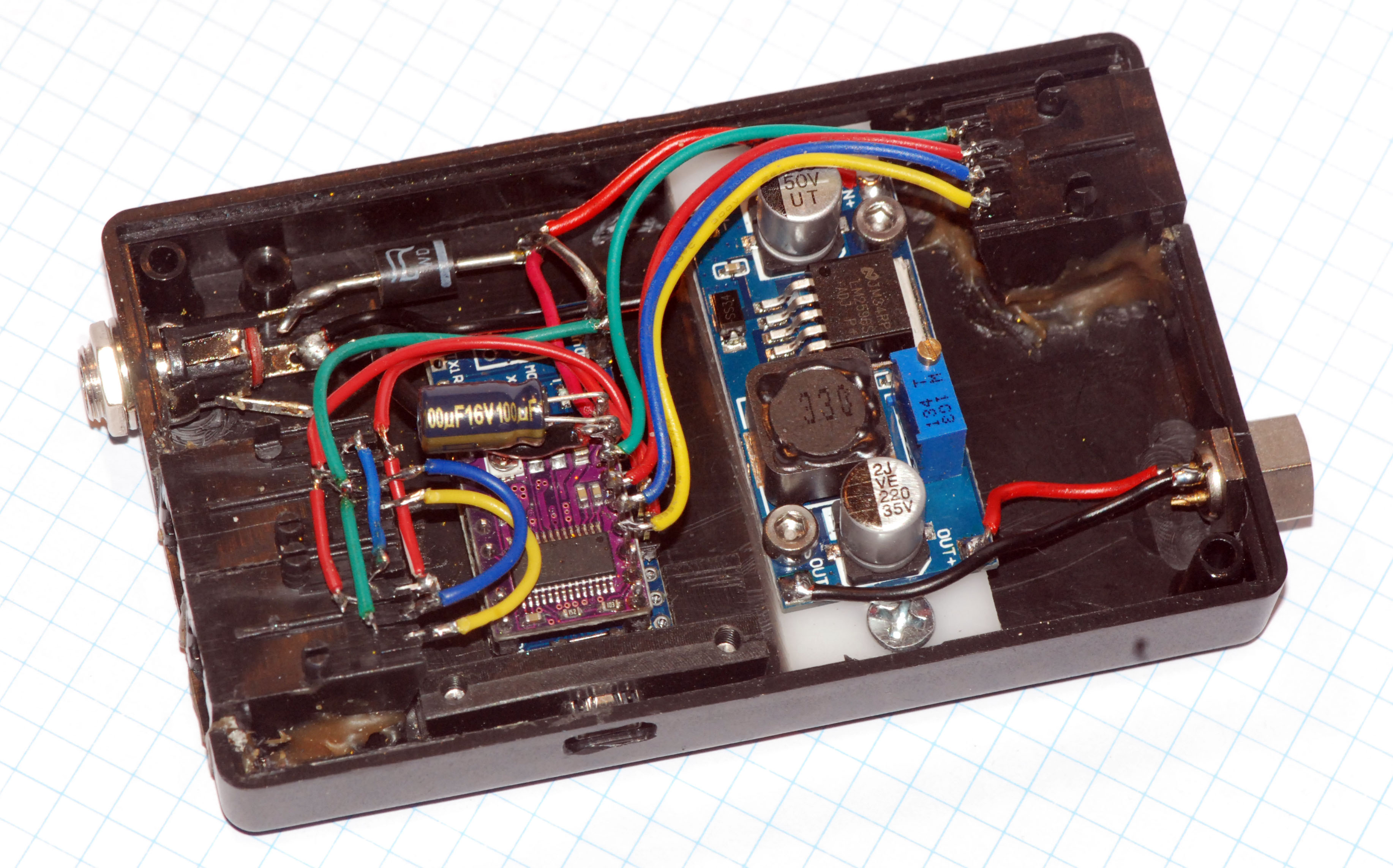
Die gesamte Elektronik der Star Adventurer Motorsteuerung ist in einer 62 mm x 100 mm x 62 mm Kunststoffbox untergebracht. Die Anschlüsse wurden möglichst robust und verwechslungssicher ausgelegt. Auf der Unterkante befinden sich ein Spannungseingang und zwei gleichwertige ST4-Ports. Ein Port wird mit dem Ausgang des Autoguiders verbunden. Die DE+ bzw. DE- Signale des Autoguiders werden zur Steuerung des DE-Antriebs verwendet. Die RA+ bzw. RA- Signale des Autoguiders werden über den zweiten ST4-Port dem Star Adventurer zur Verfügung gestellt. Der Spannungseingang ist gegen Kurzschluss gesichert. Die Elektronikbox arbeitet sicher mit Eingangsspannungen von 9 bis 15 V.
Auf der Oberkante befindet sich die Buchse für den Schrittmotoranschluss und ein 8.4V Ausgang zur Stromversorgung einer Canon Kamera. Die Spannungsregelung wurde im Gegensatz zu einer sehr verbreiteten Lösung [sternhimmel-ueber-ulm.de] hier als Schaltregler ausgeführt.
Verwendung
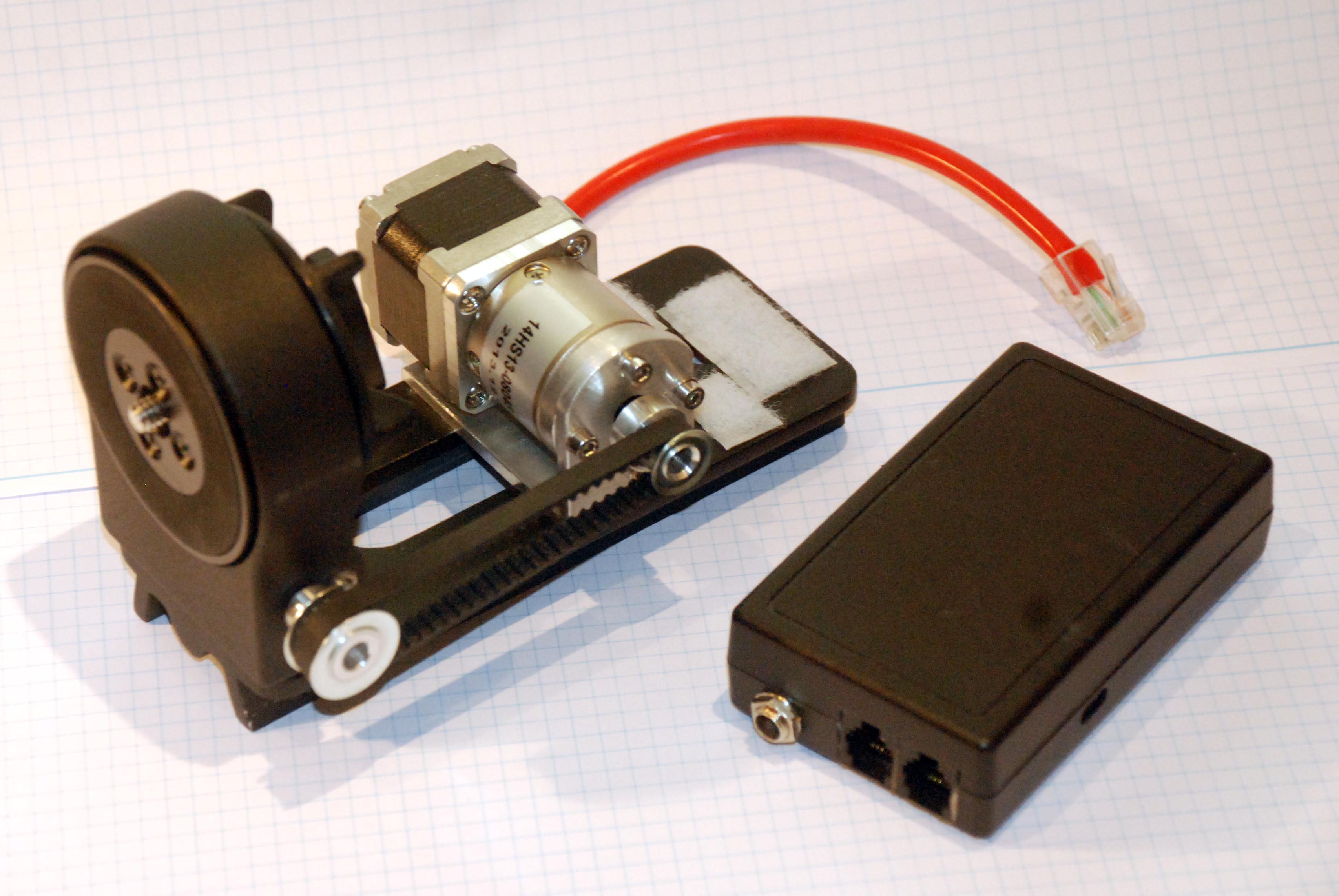
Die Elektronikbox wird mittels Klettband auf der L-Schiene befestigt. Die L-Schiene selbst stellt gewissermaßen den „DE-Block“ für den Star Adventurer dar, sie wird darauf über eine Prismenschienenklemmung befestigt. Die gesamt Anordnung ist in nachfolgender Abbildung zu sehen.
Hallo Jürgen.
die Schrittmotoren sind unkritisch. Ich bestelle Motoren fast immer bei Stepperonline (www.omc-stepperonline.com, 14HS13-0804S-PG19). Die Zähnezahlen der Zahnräder sind ebenfalls unkritisch. Ich habe sie so gewählt, dass das Ganze mechanisch passt und nirgend anstösst.
Man könnte auch überlegen, einen hochauflösenden Motor im Mikroschrittbetrieb zu verwenden. Ohne Getriebe würde man Gewicht sparen. Leider ist es immer ein wenig unsicher, wie weit die Motorn die theoretische Auflösung (z.B: 1/64) wirklich erreichen. Außerdem kann der DRV8825 das auch nicht mehr (decay). Da müsste man den RAPS128 verwenden.
Die Zahnriemenscheiben haben ein Übersetzungsverhältnis von 1:1.5 (12 Z. / 18 Z.).
Gruss,
Kai
Gibt es eine Bezugsquelle für Steppermotor/Getriebe ? wieviele Zähne haben die Zahnräder für den Riemenantrieb (übersetzung 1:1 ?) Vielen Dank für die Rückantwort