Mehrere Gründe hatten mich dazu gebracht, auf eine Avalon Linear mit StarGo umzusteigen. Ein Grund unter anderen war die erhoffte Vereinfachung der Verkabelung meines astrofotografischen Set-Up. Nach einer sehr kurzen Phase der Inbetriebnahme konnte ich bereits in der ersten Nacht meinen 90mm Refraktor nahezu perfekt nachführen und mich somit der nächsten Stufe der Inbetriebnahme widmen: Der Ersatz meiner Selbstbau-Schrittmotorsteuerung durch die in der StarGo integrierte Steuerung. Der Motor am StarGo sollter mit weniger Verkabelung und Geräten auskommen als mein altes System.
Weniger Kabel und Geräte für den Fokusmotor
Bei meiner vorhandenen Steuerung handelt es sich um einen sehr zuverlässig arbeitenden Nachbau des Stepperfocuser2.0 von Thomas Westerhoff [1], den ich über astronomie.de mit Hilfe von Jan-David Forster [2] realisiert habe. Den Motor setze ich zum automatischen Fokussieren meines Steeltracks ein. Die Montage meines Schrittmotors in der Bauform NEMA11 habe ich ein wenig bei dem Baader Steeldrive abgeschaut. Bei dem nun anstehenden Umbau waren zwei Aufgaben zu lösen:
- Der elektrische Anschluss des Motors an die StarGo.
- Umstellung meiner Bildaquisitionssoftware (Sequence Generator Pro [3]) von der alten „Robofocus-Protokoll sprechenden“ Steuerung auf die StarGo Treiber.
Der Sinn der Umstellung liegt für mich darin, dass ich weniger Kabel und Geräte einsetzen muss: Es würden entfallen: USB Kabel und Stromversorgungskabel für die alte Motorsteuerung, eine 5 V Stromquelle und die Elektronikbox.
Der Anschluss vom Motor an die StarGo der Avalon Linear
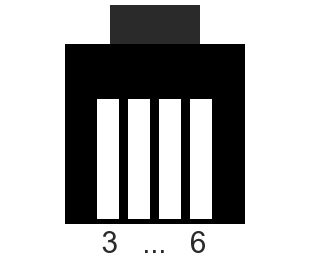
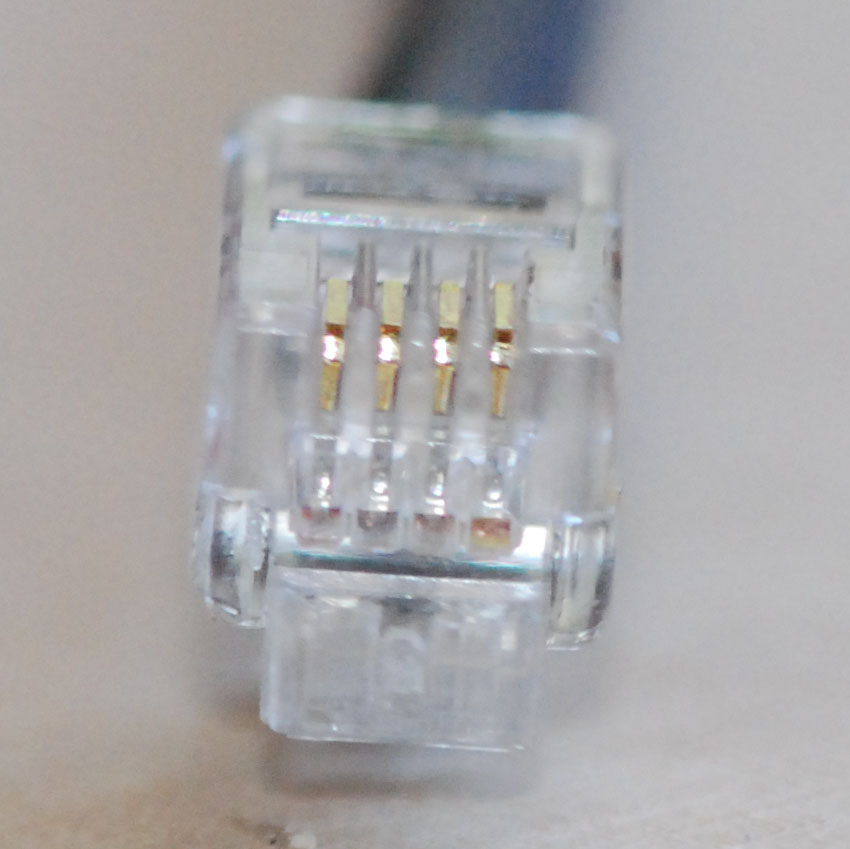
Abbildung 1 zeigt schematisch den verwendeten Stecker. Die hier angegebene Nummerierung ergibt sich aus der Tatsache, dass dieser Stecker in eine RJ-14 Buchse gesteckt genau die Pins 3 bis 6 kontaktiert. In diesem Artikel werden diese Pins mit 1 bis 4 benannt. Im Übrigen finden beide Zählweisen Anwendung und entsprechend aufmerksam sollte man bei Arbeiten mit diesen „Dingern“ immer sein. Siehe dazu Abbildung 2. Dort ist der von mir eingesetzte Stecker dargestellt. Er ist gegenüber Abbildung 1 um 180° gedreht und die hier verwendete Bezeichnung der Pins ist eingetragen.
Der hier benötige Steckertyp wird vielfach bei Telefonhörerleitungen eingesetzt. Möglicherweise kann man sich auf diese Weise geeignete Kabel beschaffen. Ich empfehle hier jedoch – falls nicht schon vorhanden – die Anschaffung einer geeigneten Crimpzange. Sollte man derartige Kabel einsetzen, so ist der geeignete Leitungsquerschnitt zu beachten.
Von der Fa. Baader erhielt ich folgende Information zu den AUX Ports. „The pinout of the AUX1 and AUX2 ports are: Aux port pin1 & pin2 to the stepper motor coil 1, Aux port pin3 & pin4 to the stepper motor coil 2. The max motor current is 1 Amp (for long time using I suggest to use max current < 0.7 Amp).“

Damit ist klar, dass die erste Spule des Schrittmotors zwischen die Pins 1 und 2 geschaltet werden muss und die zweite Spule zwischen die Pins 3 und 4. Spezifiziert ist die StarGo mit 12 V und 1 A für die Schrittmotoren. Bei lang anhaltendem Betrieb unter 0.7 A zu bleiben halte ich für sinnvoll und praxisnah. Bei Einsatz als Focuser tritt meiner Ansicht nach kein „long time using“ auf.
Der Motor meines Fokussierers hat laut Datenblatt einen Gleichstromwiderstand von 2.8 Ohm. Damit ergibt sich bei 2.66 V eine Stromstärke von 0.95 A pro Phase. Betriebe man den Motor direkt an 12 V, so würde die resultierende Stromstärke von ca. 4.3 A den Motor sicher zerstören.
Zum damaligen Zeitpunkt war mir nicht klar, inwieweit die Steuerung den Strom durch die Motorspulen begrenzt. Viele moderne Steuerungen tun das. Das hat den Vorteil, dass man viele Motoren anschließen kann, ohne passende Strombegrenzungswiderstände einbauen zu müssen. Man muss lediglich sicherstellen, dass der Motor den von der Steuerung zugelassenen Strom verträgt. Ich habe mich mit Strombegrenzungswiderständen vorsichtig herangetastet und betreibe meinen Motor jetzt ohne Vorwiderstand. Da trotzdem maximal 1 A fließen, schließe ich daraus, dass die Steuerung den Strom auf 1A begrenzt. Damit kann ich meinen Motor direkt und ohne Vorwiderstände anschließen. Das Kabel ist so auch recht einfach realisierbar. Eine zusätzliche Reduktion des Motorstromes ergibt sich auch aus der Tatsache, dass die oben angestellten Überlegungen nur für Gleichstrom gelten. Je schneller der Motor dreht, desto stärker treten die vorhandenen Induktivitäten in Erscheinung. Mein Motor hat eine eher geringe Induktivität von 1 mH, trotzdem werden in Verbindung mit den Kabelimpedanzen damit bei realistischen Drehzahlen die Ströme nochmals deutlich geringer. In meinem Fall tritt auch bei mutwilligem Dauerbetrieb über mehrere Minuten keinerlei Erwärmung des Motors auf.
Das fertige Kabel ist in Abbildung 3 zu sehen. Einen Eindruck von dem Gesamtaufbau gibt Abbildung 4.
Elektrik zum Nachmachen auf eigene Gefahr
Sollte man andere Schrittmotoren als meinen Typ anschließen wollen, so sind in jedem Fall bipolare Hybridmotoren zu verwenden. Hybrid bedeutet nichts anderes, als dass der Rotor als Permanentmagnet ausgeführt ist und der Stator als Elektromagnet. Bipolar sagt aus, dass der Motor zwei getrennte Wicklungen hat. Bipolare Motoren haben in der Regel vier Anschlussdrähte. Es gibt auch Motoren mit sechs oder mehr Anschlüssen die bipolar und unipolar einsetzbar sind. Dazu gibt es eine Fülle an Informationen im Netz. Für den Einstieg kann man [5] verwenden.
Unter Einsatz eines Ohmmeters ist einfach zu ermitteln, welche beiden Drähte zu einer Spule gehören: Die zusammengehörigen Drähte sind (relativ niederohmig) über den Gleichstromwiderstand der Spule verbunden. Bei mir sind das die oben erwähnten
2.8 Ohm. Nicht zusammengehörende Drähte sind hochohmig, d.h. man muss mindestens mehrere hundert Kiloohm zwischen ihnen messen.

Sollte man einen Motor einsetzen, der deutlich weniger als 1 A verträgt, muss man Strombegrenzungswiderstände einbauen. Für jeden Spulenstromkreis ist ein Widerstand erforderlich, also insgesamt 2 Stück. Die Berechnung erfolgt nach dem Ohm’schen Gesetz:
Es sei angenommen der Motor kann mit einer Spannung von 6.2 V bei einem max. Strom von 0.67 A pro Phase betrieben werden. Der Innenwiderstand des Motors betrage 9.2 Ohm. Da der Strom 0.67 A nicht übersteigen darf, muss dieser durch einen Widerstand begrenzt werden. Berechnet wird dies nach dem Ohm’schen Gesetz: R = U / I. Hier ist R der Widerstandswert, U die anliegenden Spannung und I der Strom.
Der Motor zieht bei 6.2 V Betriebsspannung einen Strom von 0.67 A. Damit beträgt der Widerstand des Motors R = U / I = 9.2 Ohm, was sich mit den Herstellerangaben deckt. Bei den 12 V der StarGo würden bei diesem Widerstand nach I = U / R = 1.3 A fließen. Nach meiner Erfahrung würde die StarGo hier den Strom auf max. 1 A begrenzen. Damit wäre aber der zulässige Strom für den Motor immer noch deutlich überschritten. Damit nicht mehr als 0.67 A fließen, muss ein Vorwiderstand her. Um 0.67 A nicht zu überschreiten werden R= U / I= 12V / 0.67A = 17.9 Ohm an Widerstand benötigt. Die Motorspule selbst trägt auch zum Gesamtwiderstand bei. Es wird also ein Vorwiderstand RV benötigt, der sich nach folgender Formel berechnet:
RV = Rgesamt – Rspule = 17.9 Ohm – 9.2 Ohm = 8.7 Ohm
Da es diesen Wert nicht gibt, sucht man sich aus der Widerstandsreihe einen passenden aus. In der Praxis wird bei diesem Widerstandswert der Strom deutlich geringer ausfallen, weil die Endstufen der Elektronik wahrscheinlich auch noch einen Spannungsabfall um 1 V erzeugen und die Impedanzen nicht berücksichtig wurden.
Steuerung vom Motor durch StarGo
Die StarGo Steuerung der Avalon Linear lässt sich in Sequence Generator Pro (SGP) problemlos als ASCOM kompatibler Fokussierer ansprechen. Automatisch wird dann AUX1 gesteuert. Das macht insofern Sinn, als dass AUX0 ja fest dem Anschluss des Baader Steeldrive zugeordnet ist. Ich vermute, habe das aber nicht nachgeprüft, dass eine dritte Verbindung des ASCOM Interfaces AUX2 anspricht.
Die Steuerung des Fokussierers über die StarGo-Software funktionierte sofort und fehlerfrei. Die Bedienung der StarGo-SW ist auch auf dem AUX-Panel einfach und klar ersichtlich. Ein Hinweis zum Motor Speed. Dieser Parameter dient zur Einstellung der Geschwindigkeit des Motors. Sehr positiv ist zu vermerken, dass die Ansteuerung hier über eine Rampe erfolgt. Das ermöglicht recht hohe Endgeschwindigkeiten. Dennoch sollte man bedenken, dass das Drehmoment eines Schrittmotors mit steigender Drehzahl abnimmt. Da die Reproduzierbarkeit der Fokuspositionen für mich sehr wichtig ist, darf es auf keinem Fall zu Schrittverlusten kommen. Deswegen ist die Geschwindigkeit nicht zu hoch zu wählen. Zuverlässigkeit (kein Schrittverlust) geht hier vor Schnelligkeit. Daher habe ich die Position durch Versuche herausgefunden, in der ich noch keine Schrittverluste habe (bei mir ist das fast). In der Praxis fahre ich dann eine Stufe langsamer (medium). Das gibt mir die Sicherheit, dass nicht doch plötzlich unter nächtlichen Bedingungen Schritte verloren gehen und mein unbewachter Autofokusdurchlauf Ausschuss produziert.
Leider hatte ich Schwierigkeiten mit der Steuerung über die ASCOM Schnittstelle mittels SGP und auch mittels APT-Tools [6]. Johannes Baader stellte kurzerhand den Kontakt zu Luciano Dal Sasso her. Im nachfolgenden kurzen Emailverkehr stellte sich heraus, dass SGP keine negativen Schrittpositionen mag. In alter RoboFocus-Gewohnheit ist die kleinste Position, die SGP zulässt Eins. Positionen darunter, also Null und negative Werte führen zu Irritationen. Auch das eigentliche Problem wurde, nachdem ich eine genauere Fehlerbeschreibung geliefert hatte, sehr kurzfristig gelöst. Keine 10 Tage nach dem ersten Kontakt hatte ich eine gepatchte StarGo-Version, die nun auch über den ASCOM Treiber angesprochen den Fokusmotor so steuert, wie es sein soll.
Fazit
Für jemanden, der wie ich (Physiker mit Dreh- und Lötkenntnissen) gerne bastelt, sollte der Anschluss eines Motors kein Problem darstellen. Ich habe das System zwar noch nicht am Sternenhimmel testen können, aber meinen „Trockentests“ traue ich uneingeschränkt. Besondere Freude hat mir der Kontakt zu Herrn Dal Sasso bereitet. Da scheint tatsächlich jemand Geräte zu verkaufen, der sie auch selbst nutzt und auch die kleinen Probleme des Amateurs lösen mag.
Referenzen
[2] http://forum.astronomie.de/phpapps/ubbthreads/ubbthreads.php/topics/1087751
[3] http://mainsequencesoftware.com/
[5] http://www.roboternetz.de/schrittmotoren.html
[6] http://www.ideiki.com/astro/Default.aspx
Kai Wicker Bremen im November 2014
Hallo Michael,
das sieht dem Fall sehr ähnlich, den ich letztes Jahr hatte. Meine Monti schien in DE plötzlich deutlich Spiel/Backlash aufzuweisen. Ich habe es auch daran gesehen, dass die PHD Kaibrierdaten ungewohnt schlecht aussahen. Die Ursache waren die Riemen, die inzwischen teilweise zu Staub zerfallen waren und dementsprechend einige Zähne verloren hatten. Ich habe darauf einen neuen Satz Riemen eingebaut. Die Alten musste ich teilweise als Brösel rausfegen. Seitdem läuft meine Linear wieder wie am ersten Tag. Im Nachhinein habe ich festgestellt das die Guidingqualität (RMS, arc sec) auch wieder deutlich besser geworden ist. Weiteres Plus dieses Austauschs: die neuen Riemen sind weniger elastisch als die Originalriemen. Das macht die Montierung vom Gefühl her etwas steifer.
Gruss,
Kai
Hallo Kai, ich habe auch eine Avalon Linear (10 Jahre alt) und habe den Verdacht, dass die Riemen nicht mehr die alte Spannung haben. Meine Beobachtung ist, dass nach einem Dithern es relative lange Zeit braucht (20 – 30 s) bis die Montierung wieder ruhgig läuft.
Habe allerdings bislang keine weiteren und genaueren Analysen gemacht. Dacht mir frage mal jemanden der die gleiche Montierung hat was er für Erfahrungen hat.
Gruß Michael