Motivation

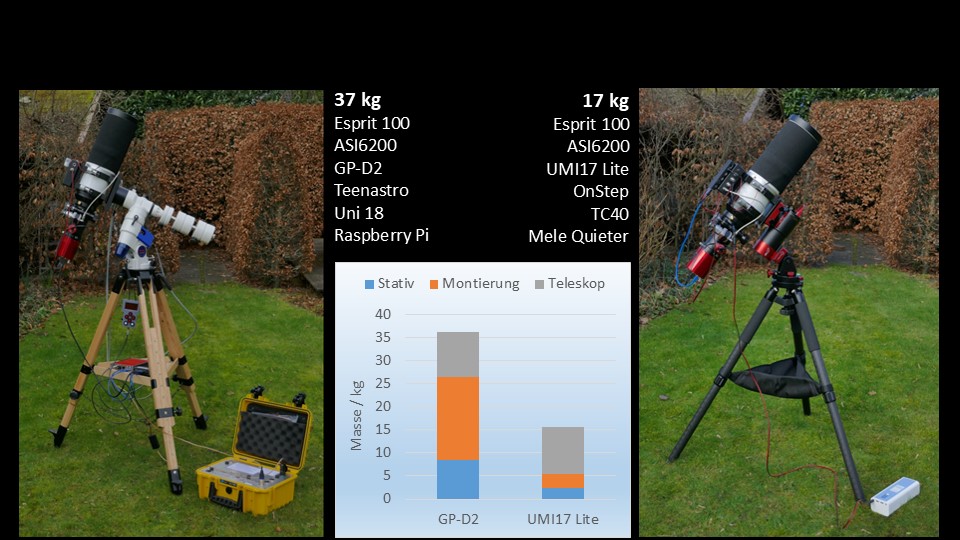
So far my so-called mobile gear consisted of my Esprit 100 carried by a Vixen GP-D2 controlled by a TeenAstro. All in all the weight sums up to 37 kg without power supply. It depends on the viewers point of view, whether this is mobile or not. In my opinion compared to my 10″ Newton at the Linear it is too heavy. I think that the GP-D2 setup is less mobile than the Newton setup, although the telescope is actually smaller. In recent time harmonic drive mounts as the UMI 17 Lite distributed more and more even in the lower price segments. And the technology aroused my interest more and more.
Recently a seller in China appeared in a forum which is at least for me more known as gamers place. Since I had seen good feedback about this dealer at Astronomie.de, I finally took the somewhat daring step of buying this mount through this channel. Everything went well and now I have a pretty handy UMI 17 Lite mobile setup as a result. Meanwhile, the dealer has his own online presence.
UMI 17 Lite
 The UMI 17 Lite arrived as promised in a plastic suitcase with all ordered parts. In addition I ordered the CF40 tripod. As I planned to reduce weight of the set-up this seemed to be a valid option. Another option ordered was the 3″ dove tail clamp. It came as a separate part with my delivery. My telescopes are equipment with 3″ dove tails. This enables me to switch gear without having to deal with matching dovetails. In order to match the UMI 17 Lite with the 3″ clamp into the suitcase I modified the foam inlay.
The UMI 17 Lite arrived as promised in a plastic suitcase with all ordered parts. In addition I ordered the CF40 tripod. As I planned to reduce weight of the set-up this seemed to be a valid option. Another option ordered was the 3″ dove tail clamp. It came as a separate part with my delivery. My telescopes are equipment with 3″ dove tails. This enables me to switch gear without having to deal with matching dovetails. In order to match the UMI 17 Lite with the 3″ clamp into the suitcase I modified the foam inlay.
The UMI 17 Lite is a German Equatorial Mount (GEM) wich can also be driven als Alt/Az-mount. According to its specification this mount should carry my Esprit without moan. A set of manufacturer’s specifications is given in the table below. I didn’t check these data in detail, but in my opinion they match well.
| Supported Software | ASIAIR, NINA, KStars and others |
| RA | NEMA17 42mm, type-17 harmonic, 500:1 reduction ratio |
| DE | NEMA17 42mm motor, type-14 harmonic, 100:1 reduction ratio |
| Power loss braking | RA & DE |
| Payload capacity | 10-13kg without cw, 15-18kg with cw |
| Main body weight | 2.8kg |
| Saddle | Vixen or Losmandy |
| CW (bar thread) | max. 3kg (M12) |
| Power input | DC 5.5-2.1 (12V 3A) |
| Communication | USB, Wi-Fi, Bluetooth, ST-4, 2.5mm shutter release |
| GoTo speed | 3.0 deg/sec |
| Polar scope support | Compatible with all models on the market |
The manufacturer does not give values regarding the step size and the corresponding resolution at the sky, hence I had to investigate a little. I found some information related to the UMI 17 (without „Lite“). With these data and the specifiactions above I came to the conclusion, that the step size might be 0.2025 arc sec in DE and 1.0125 in RA. The RA-value might be quite large, but my tests show that the mount runs pretty good under real skies.
Tripod

It revealed that it was a good choice: the 2.5 kg carbon tripod replaces the 8.4 kg Berlebach UNI18 tripod. The CF40 is only 76 cm high, which forces you to crawl around the scope on the ground. In contrast the UNI18 can be so high that one can operate the whole scope while standing. Even at this height the UNI18 is significant more solid than the CF40 at 76 cm. Anyway, to state it clearly: There is huge difference regarding stability and usability of the tripod, but in this context the CF40 is the best choice for a compact and mobile set-up. The overall stability of my set-up for the UMI 17 Lite with Esprit 100 ED is still satisfying.
The Telescope
 My Skywacher Esprit 100 ED in its latest configuration is the telescope for this mobile gear. It is quite heavy with its 7.8 kg, but thats the price one has to pay for a triplet and a 3″ Feather Touch.
My Skywacher Esprit 100 ED in its latest configuration is the telescope for this mobile gear. It is quite heavy with its 7.8 kg, but thats the price one has to pay for a triplet and a 3″ Feather Touch.
Telescope Control
 In order to keep the number of parts as less as possible and the parts so small as possible I had to design my own components. Devices of the market did not fit to my needs. The photo shows the electronic module ready for use. It keeps all needed power sockets with appropriate voltages, the stepper motor control and the mini PC hosting KStars and Ekos.
In order to keep the number of parts as less as possible and the parts so small as possible I had to design my own components. Devices of the market did not fit to my needs. The photo shows the electronic module ready for use. It keeps all needed power sockets with appropriate voltages, the stepper motor control and the mini PC hosting KStars and Ekos.
Electronic Box
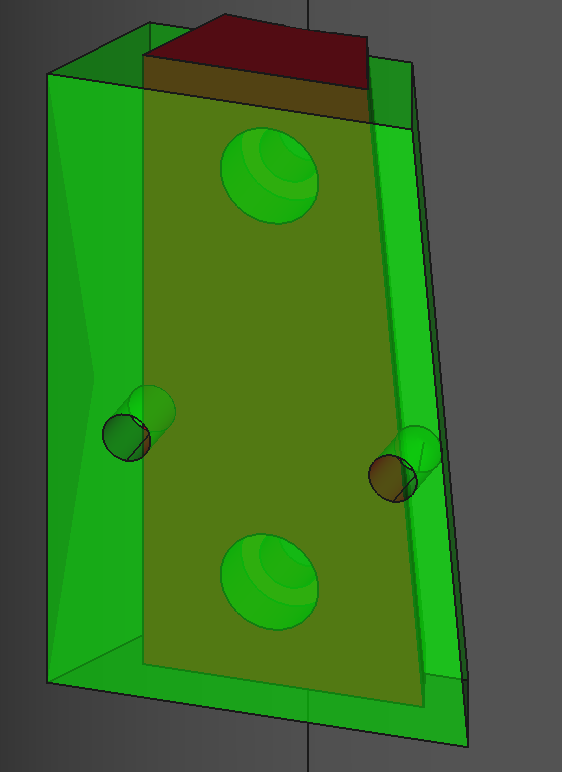
Drawings related to this section are place here. For some things I have FreeCAD models available on demand.
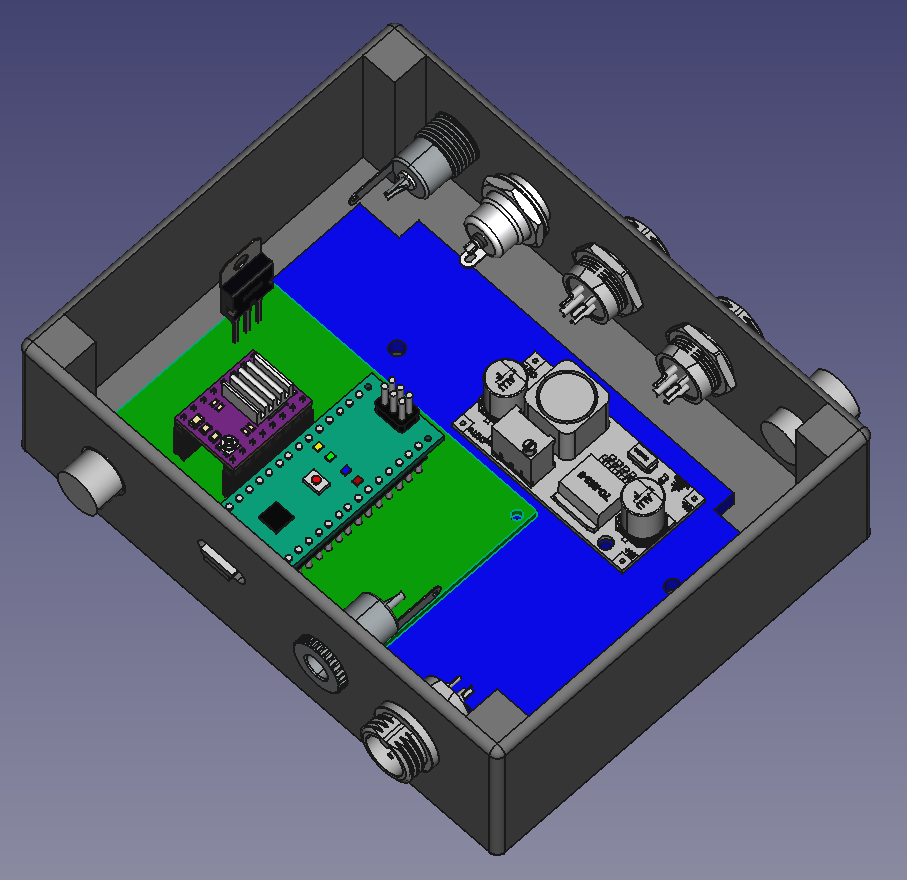
The UMI 17 Lite is OnStep controlled. I had good experiences with my built OnStep control witch i gave away. So my expectation was, that the UMI 17 Lite should be as easy to control as my older set-up. Initial tests confirmed that. The actual heart of the telescope control is mounted on the telescope itself: it is the electronics box with the associated mini PC. The electronics box is a standard ABS box with dimensions of 38.5 mm x 100 mm that is filled with the necessary internal components. It contains a
- self machined base plate (blue),
- the MyFocuserPro2 PCB board,
- an Arduino Nano,
- a stepper driver DRV8825
- and a LM2596 DC/DC converter (grey).
Attachment of Telescope Control
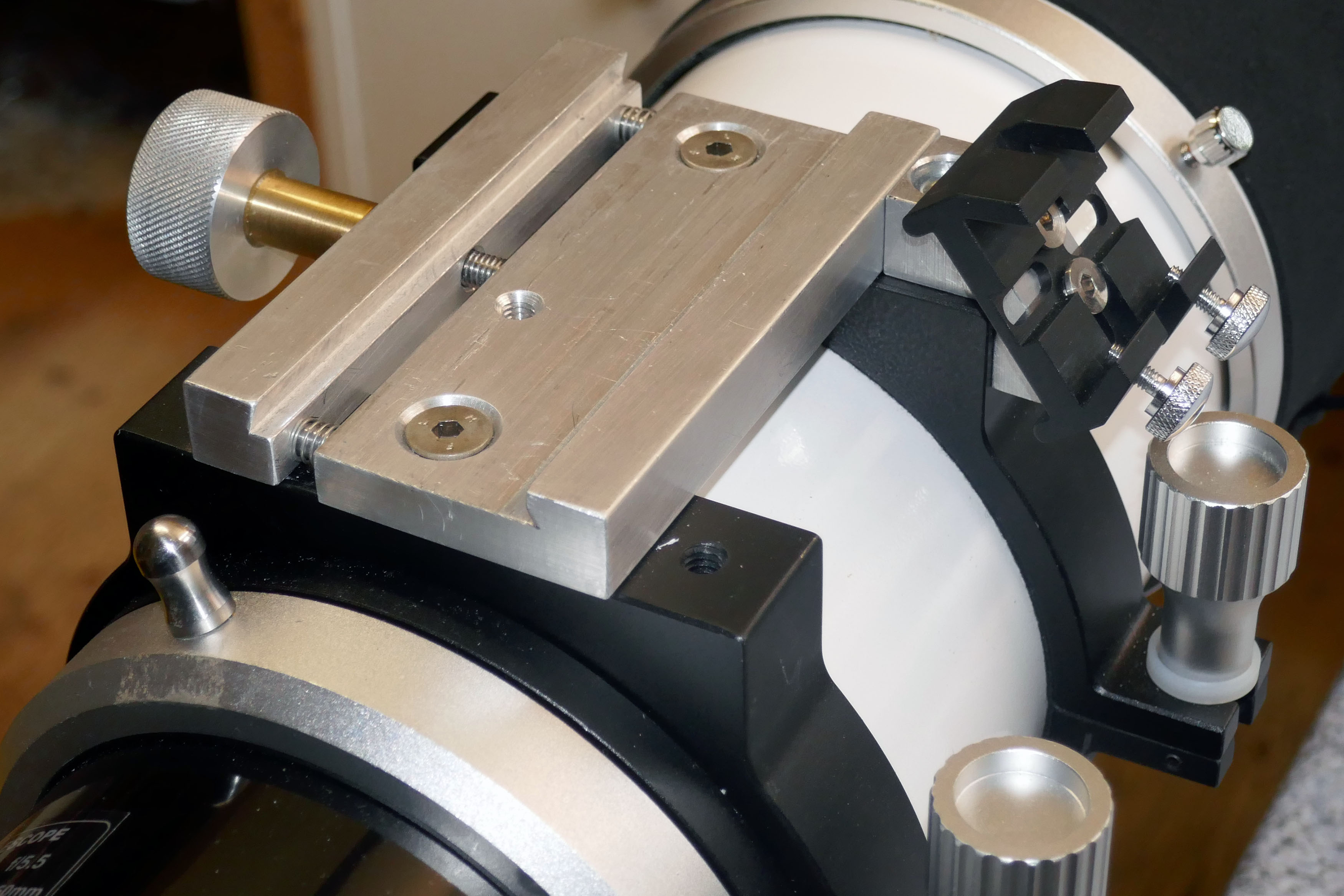
MyFocuserPro2 is ASCOM and INDI compatible. This enables the stepper control to be controlled from many platforms, e.g., Windows based and Linux based ones. The box connects mechanically to the scope via a GP dovetail. My scope is equipped with my well-proven dovetail clamp. This usually holds a handgrip for transport which can be replaced by the electronic box with its dovetail.
{kind=link}
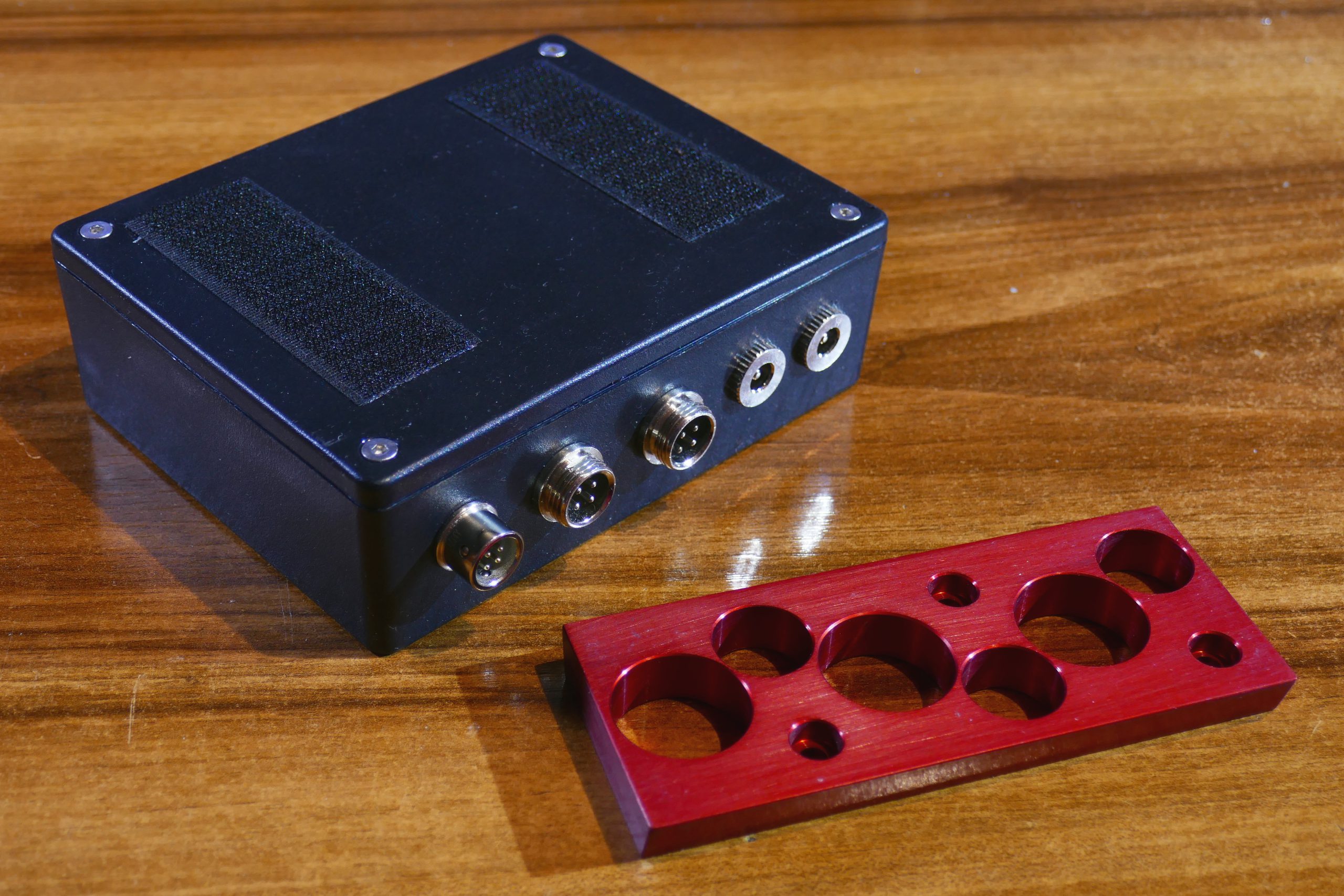
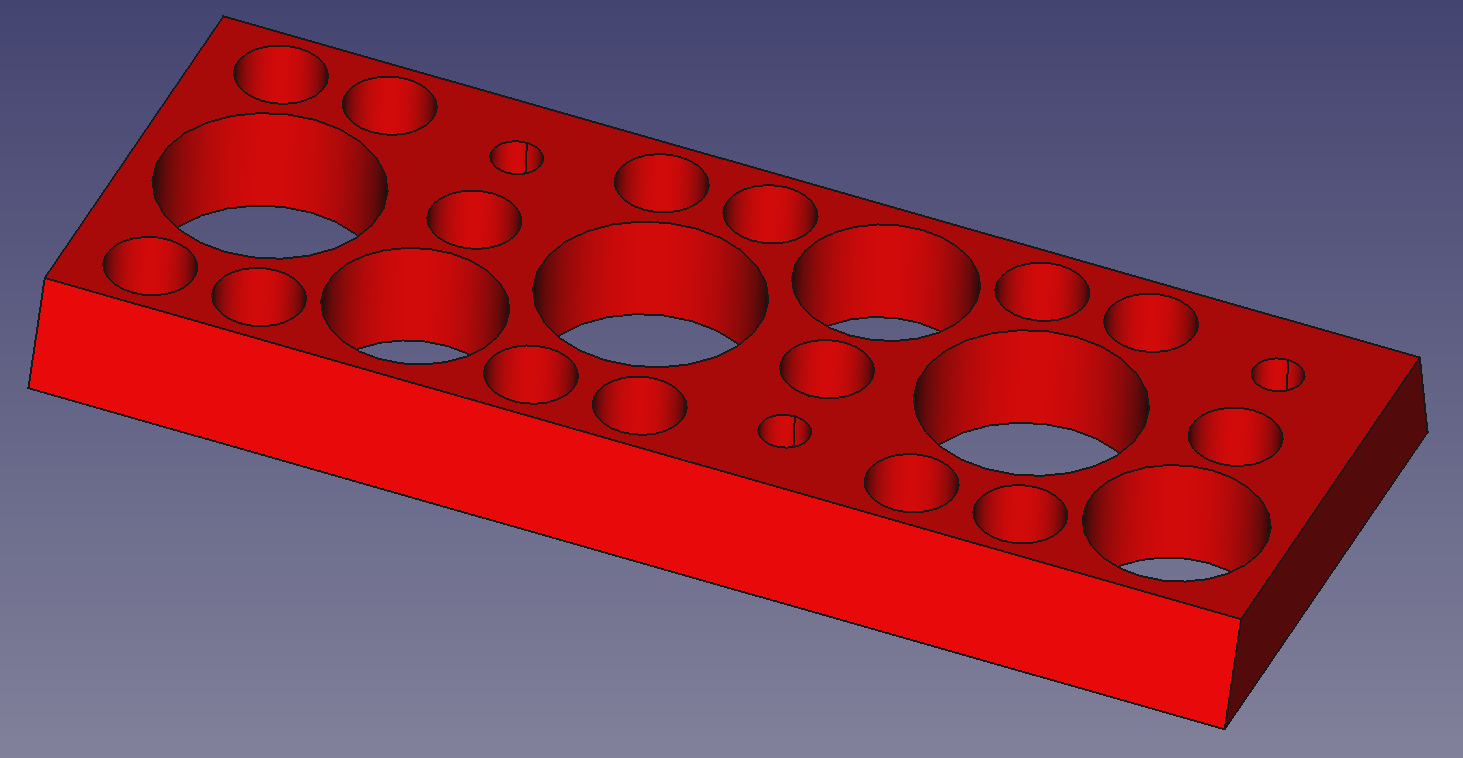
The dovetail was designed to minimise weight. Find here a drawing. In order to achieve this, the height of the dovetail was kept as flat as possible (10 mm instead of typically 15 mm) and weight-saving holes have been milled. The second photo shows the box with the red anodised dovetail.
After some years I introduced a few different connectors for my telescopes. I want to use connectors that are technically suitable and yet inexpensive. Of course, I try to use as few different types as possible. Due to the different requirements, this is not always possible. In any case, I try to ensure that no damage is caused by confusion. At least that has worked so far; no damage has occurred due to incorrect connections. My connection scheme used is drawn here.
Mini PC
 The Raspberry Pi doesn’t always seem to be able to establish a reliable connection to ZWO full-frame cameras [cloudy nights]. All in all I reproduced this with different Linux distributions and two Raspberrys. Consequently I had to change my approach and decided on the MeLE Quieter 4C. This company is known for energy-efficient mini PCs and this particular model with a fanless Intel N100 seemed to be the right PC. It came with 16 GB RAM, 512 GB flash and Win11 Pro. I deleted the operating system and installed an Ubuntu Linux with KStars.
The Raspberry Pi doesn’t always seem to be able to establish a reliable connection to ZWO full-frame cameras [cloudy nights]. All in all I reproduced this with different Linux distributions and two Raspberrys. Consequently I had to change my approach and decided on the MeLE Quieter 4C. This company is known for energy-efficient mini PCs and this particular model with a fanless Intel N100 seemed to be the right PC. It came with 16 GB RAM, 512 GB flash and Win11 Pro. I deleted the operating system and installed an Ubuntu Linux with KStars.
Smart Hand Controller
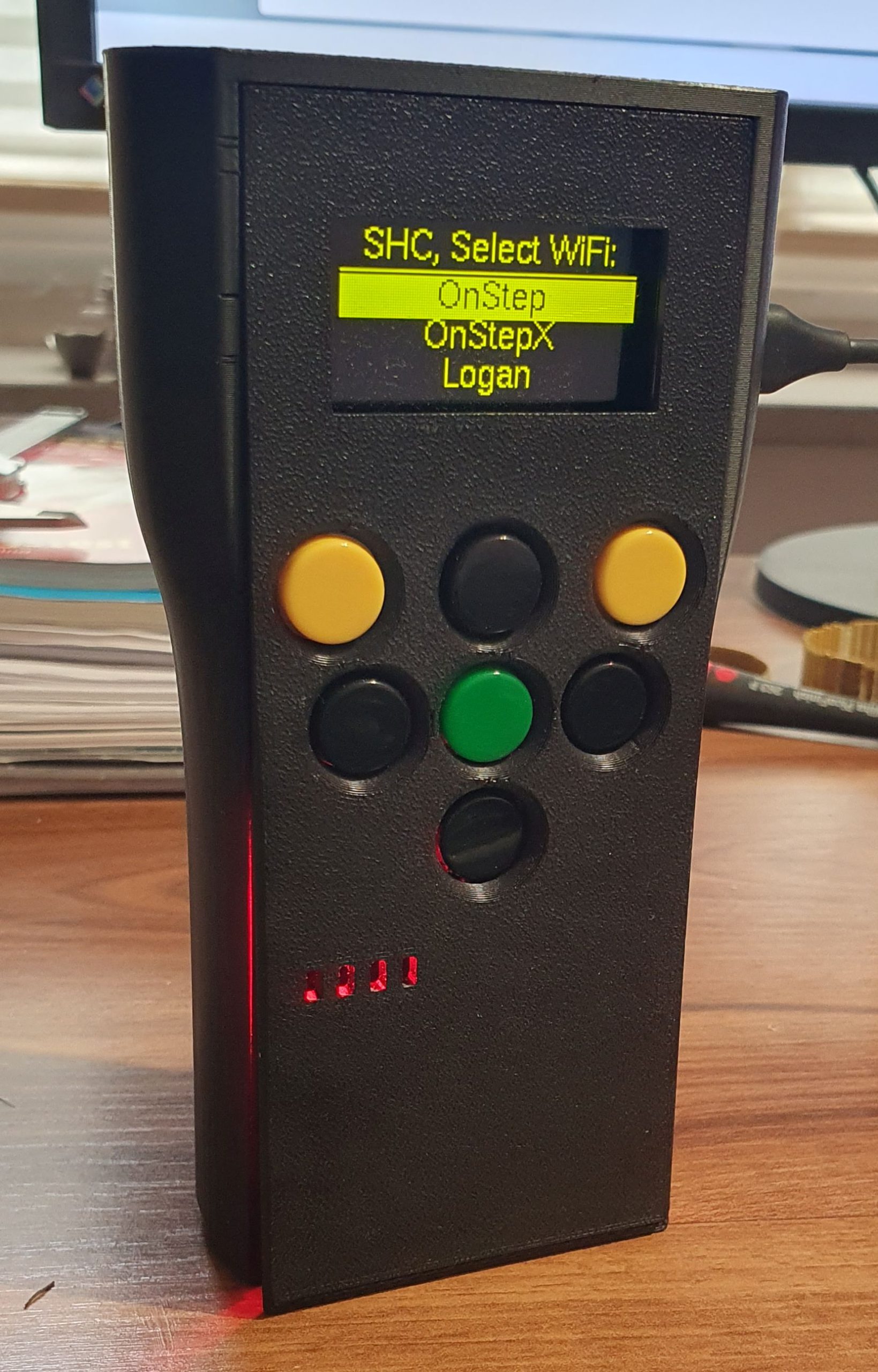
As an slightly old fashioned astro amateur I don’t want to rely on smartphones and touch displays. Surely they are nice for cat videos, but during a wet and cold clear night I prefer to have old fashioned buttons. For this reason I set-up an OnStep Smart Hand Controller. Actually this should be compatible with the OnStep of UMI 17 Lite. Unfortunately, I was not able to establish a WiFi connection between SHC and UMI 17 Lite. Therefore, I had to resort to the cable connection between SHC and UMI. The hand controller works perfectly with this connection and full control of the UMI 17 Lite is possible.
Other Small Mods for the Mount
Red Dot Polar Finder
 In my opinion a simple visual helper for a quick rough polar alignment is inevitable. The UMI 17 Lite doesn’t have any tools for this.
In my opinion a simple visual helper for a quick rough polar alignment is inevitable. The UMI 17 Lite doesn’t have any tools for this.
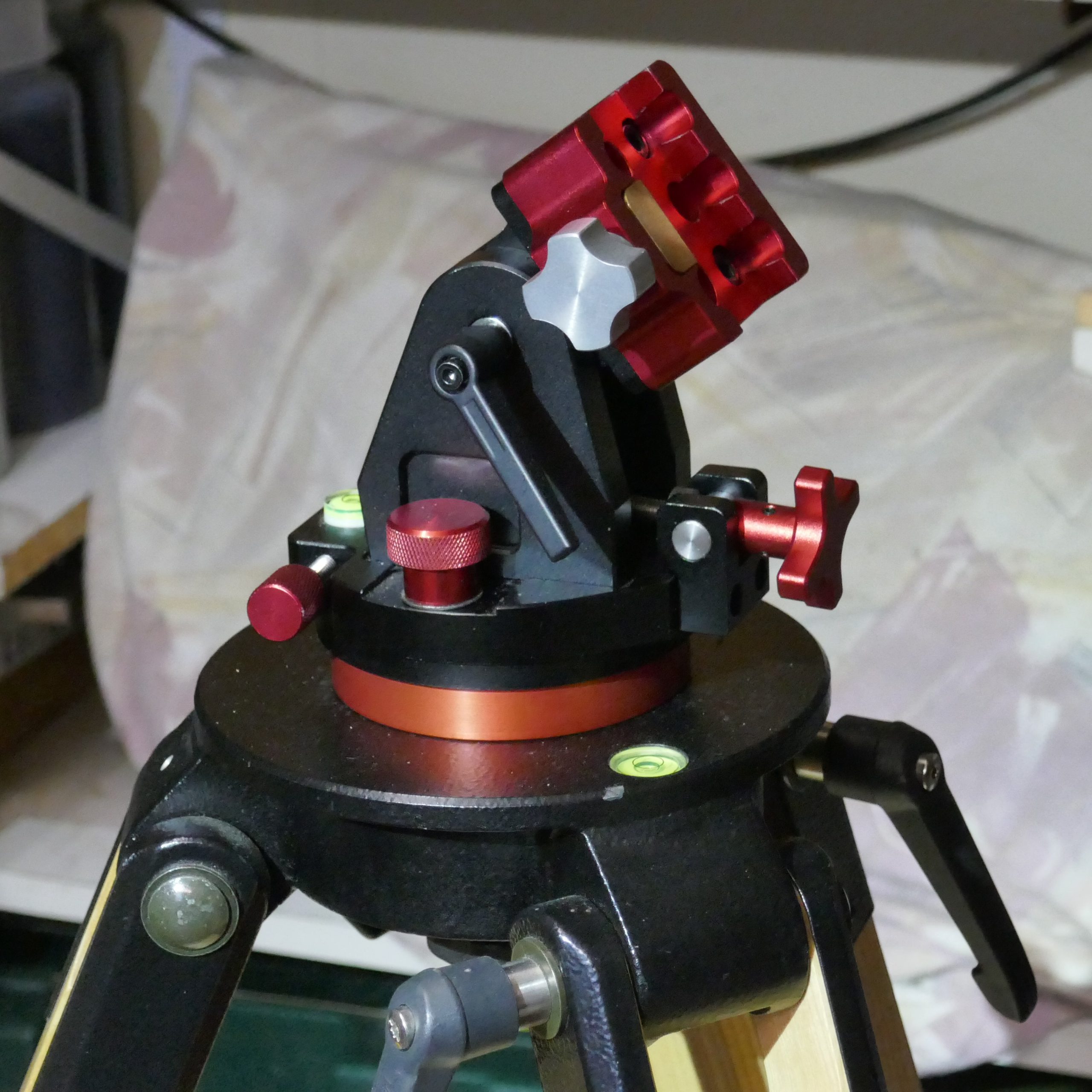
Here a solution which works without tools as, e.g., Allen Keys. A laser finder from a famous trading platform is the heart of the polar finder. An important point is a reproducible attachment of the laser finder to the mount. In ordere to achieve this there is a small dovetail on the mount that tapers towards the top. Similarly the laser finder is placed onto this. Therefore the finder has an inverse dovetail that also tapers towards the top. It is form-fitting and sits so tightly that the laser pointer only needs to be placed very lightly on it. The drawings are available.

The composite photo shows the dovetail on the UMI 17 Lite without and with attached laser finder.
In my case the final polar alignment is aided by the Ekos Alignment Module which gives good results in 5 minutes. You just shouldn’t make the mistake of trying to achieve too high an accuracy in the alignment. Firstly, the mechanics of the setup (stiffness of the tripod and polar wedge) don’t allow for that, and secondly, in most cases it’s not even necessary. For me, it’s sufficient in all cases if the error is less than 15 arc min.
Adaptor for Berlebach Uni 18
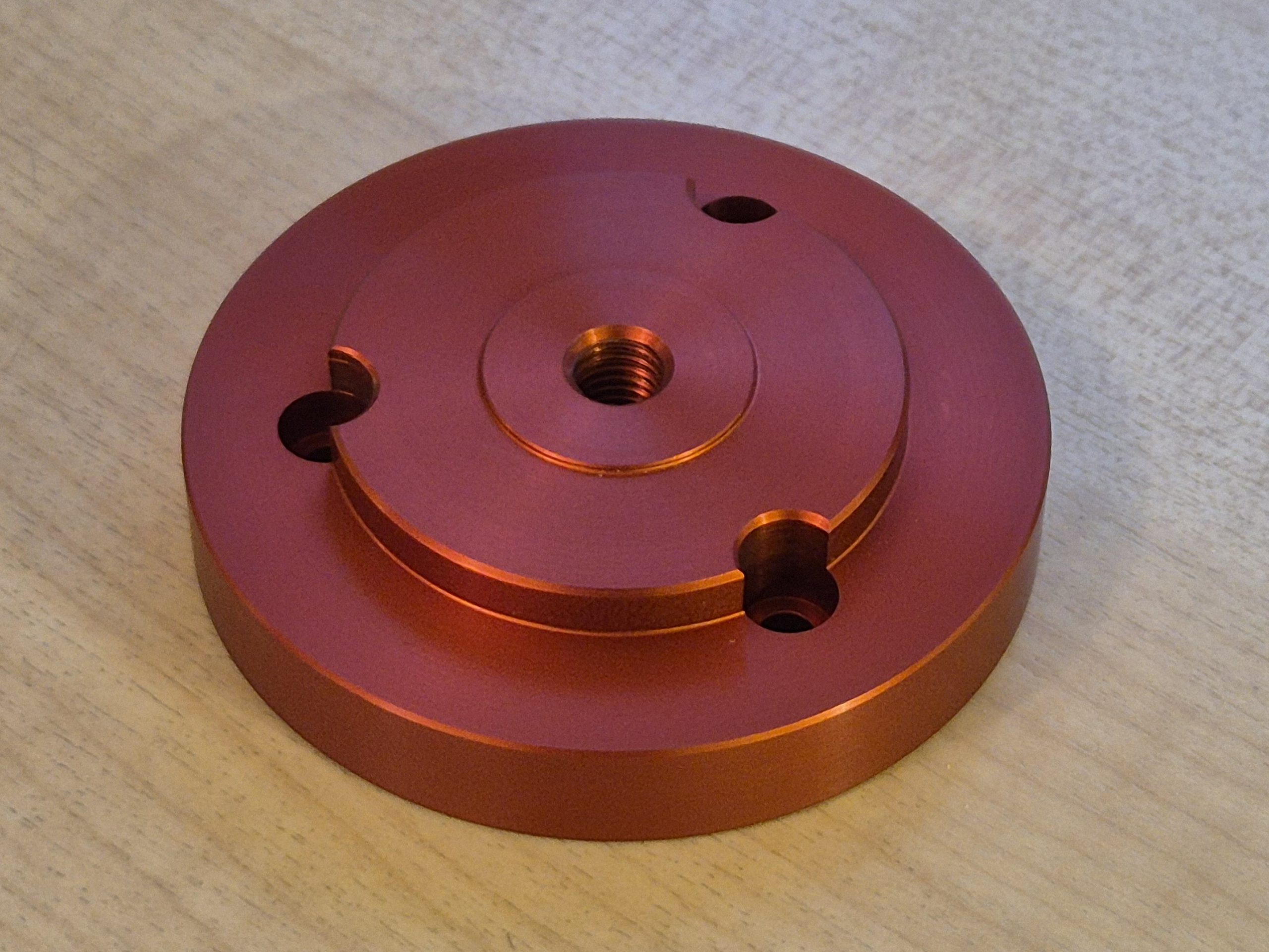
As witten above the Berlebach is more rigid and more comfortable. Hence I prefer the Berlebach during stationary use in my garden. I didn’t want to modify my UNI 18 with Vixen-plate. Due to this I had to design and machine an adaptor. By this little thing the UMI polar wedge is easily fitted to my Berlebach in its original configuration. Only the polar bolt has to be removed for this, but this operation is reversible.
The picture shows the UMI polar wedge on the Berlebach. The wedge is already equipped with the shortened clamping screw (next section).
Short Screw for Polar Wedge
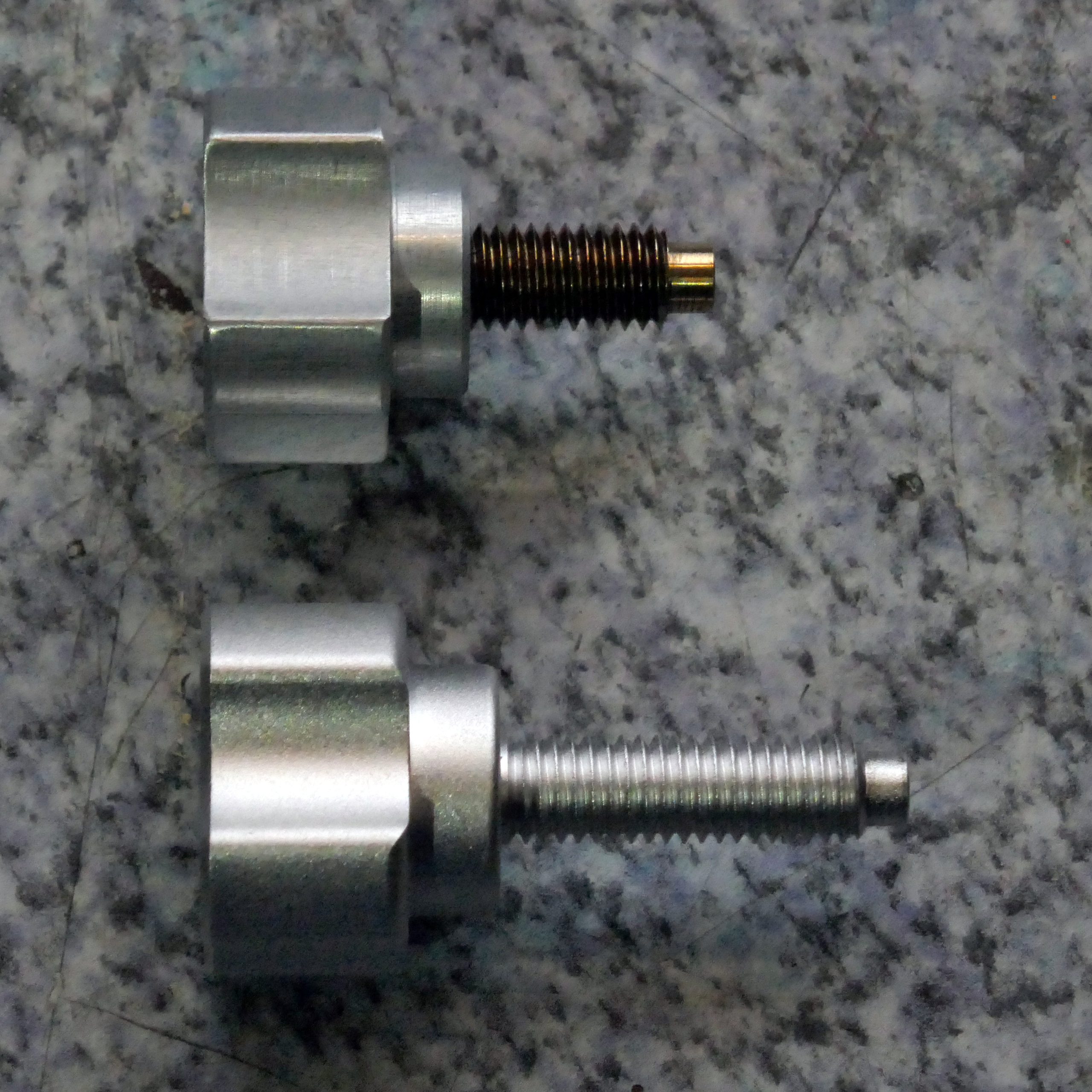
When delivered, the polar wedge came with a clamping screw that was by far too long. It could even hinder the movement of the telescope. Nobody knows what the designers were thinking. The photo shows the longer original screw and the shorter replacement screw that I made. The new one is already part of the polar wedge photo above. Find the drawing here.
Anti-slip Protection for Polar Dovetail
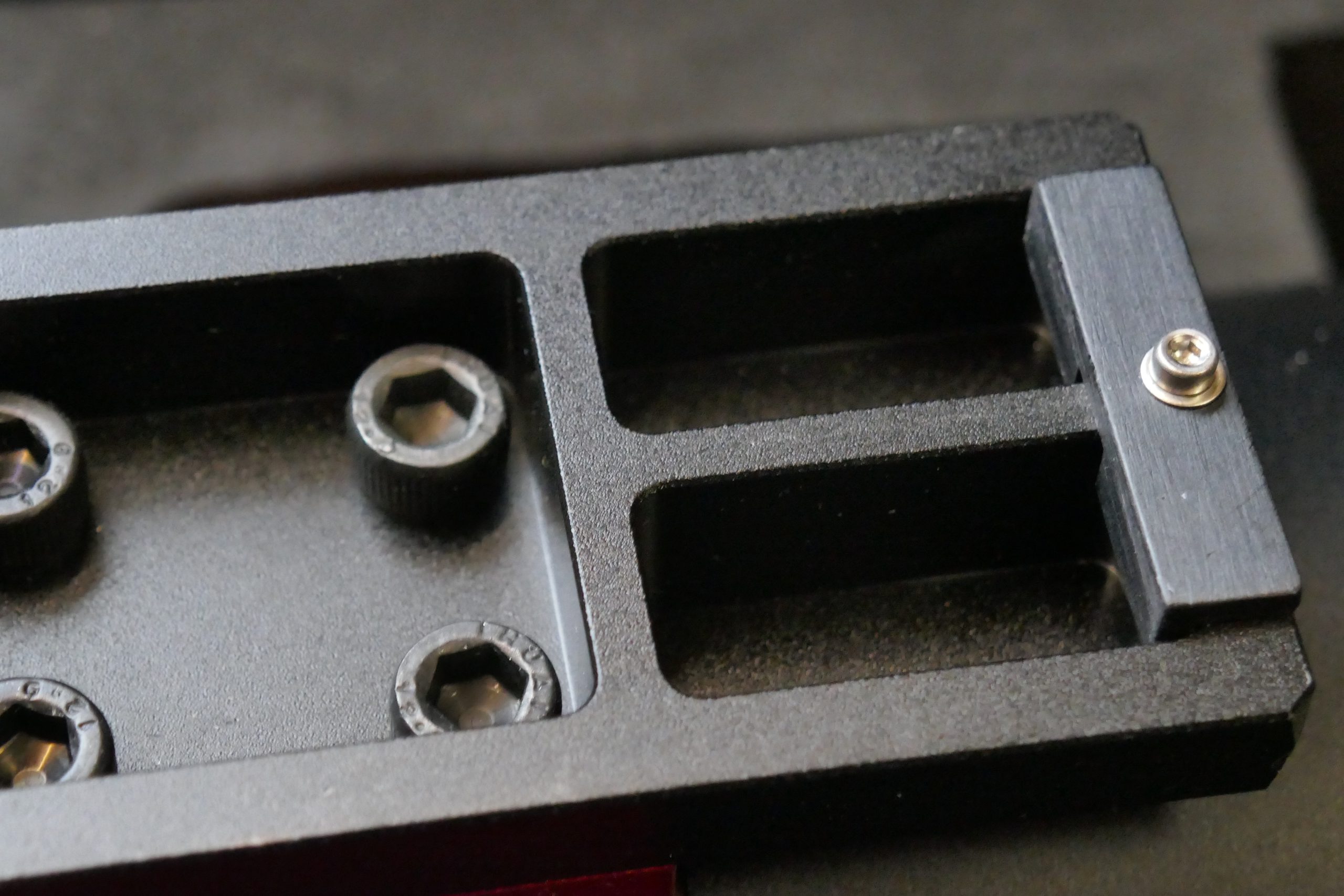
Just a safety gimmick to avoid the whole mount – probably with telescope – slipping through the dovetail clamp. A very small pice of anodised alloy on fixed by a M2.5 screw. But thats not an issue becaus the alloy pice itself holds its position by form closure.
UMI 17 Lite Test Results
Guiding
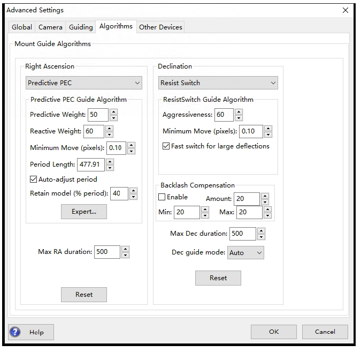
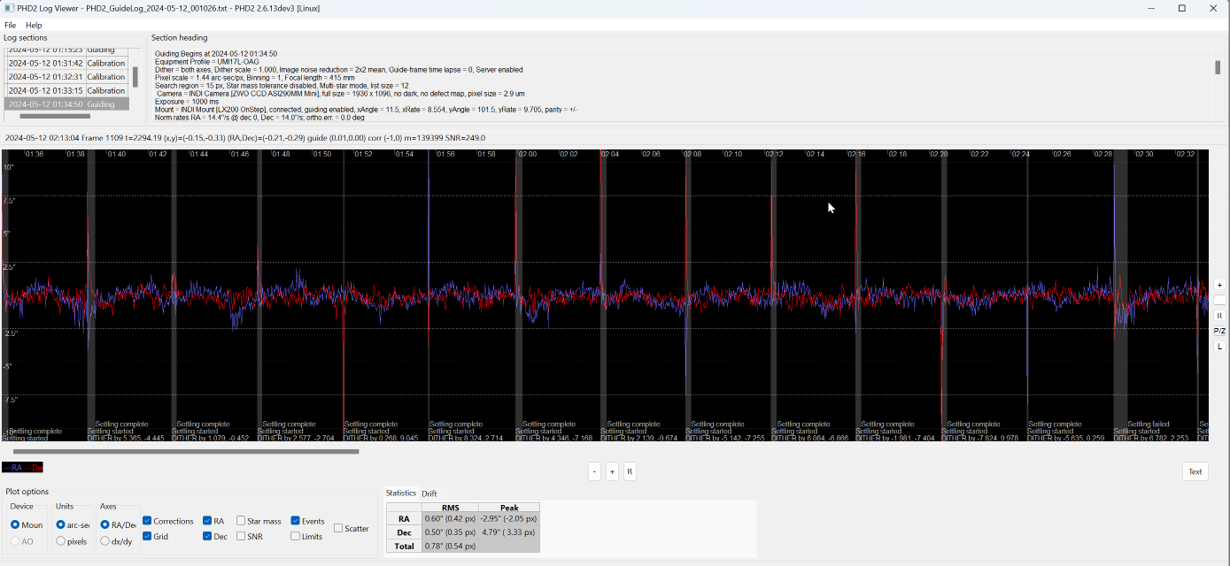
The first light was promising. As guide cam I used a ZWO ASI 290mm mini with 2.9µm pixels. This is not the ideal cam for off axis guiding, but I had no issues in finding guide stars at all. The high resolution does not lead to issues as long I have this in mind while adjusting guiding parameters. The guiding parameters I used were similar as the manufacturers proposal. I don’t see reasons to deviate from these. The mount did its job without any problems.
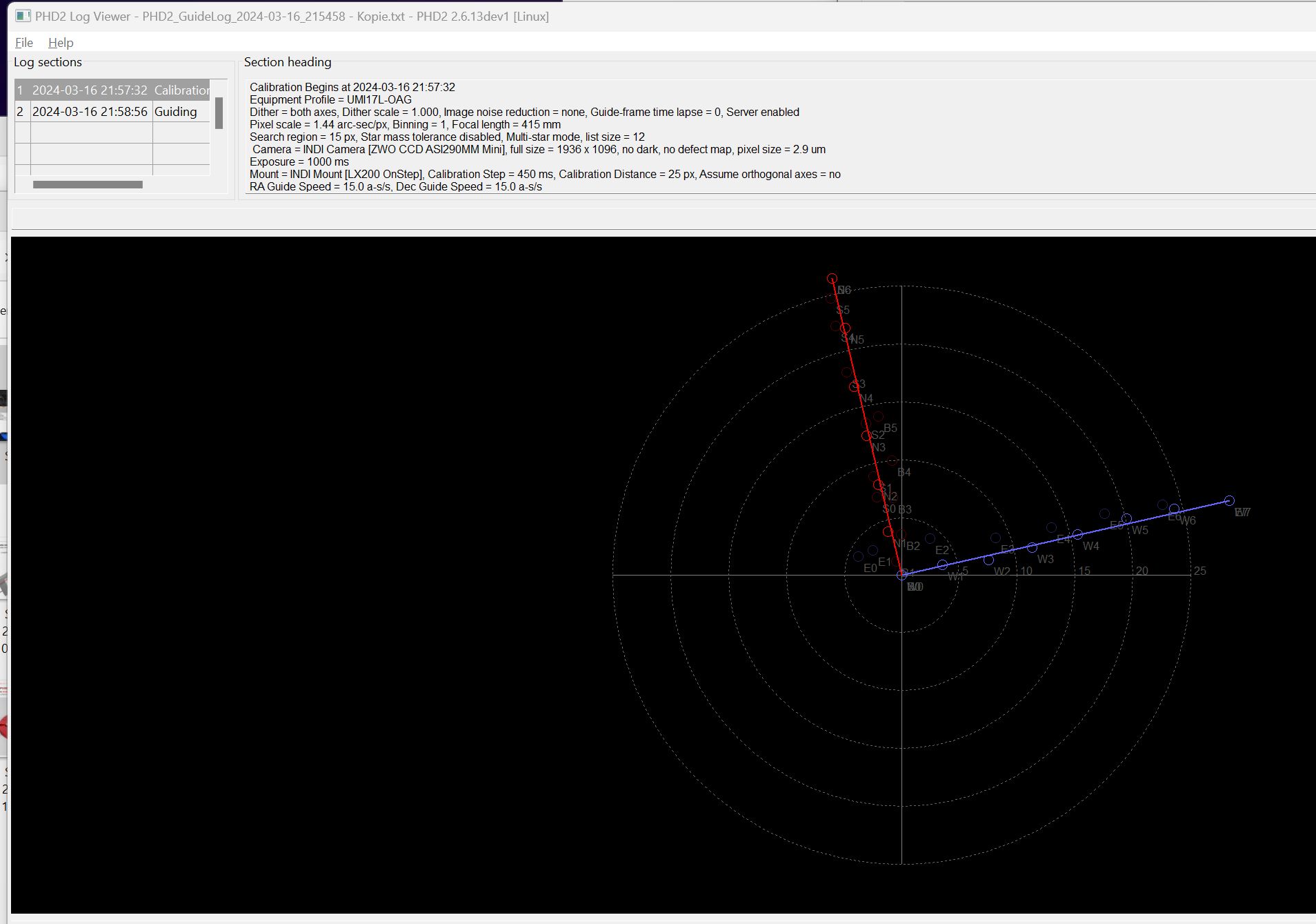
Correspondingly the PHD2 calibration plot showed a shape as expected for a harmonic drive mount, almost perfect. The measured guiding accuracy is significant below 1 arc sec. In the meantime I used this gear for some hours of imaging and, what is the most important thing for me, I never had to reject a frame due to guiding issues of the UMI 17 Lite.
Photos


Have a look at Eagle Nebula and Veil Nebula shot in Summer 2024 with my currently accepted set-up. Imaging parameters are at this page.
{kind=link}
{kind=link}