Im Vereinsheim der Astronomischen Vereinigung Lilienthal AVL steht seit Ewigkeiten eine ungenutzte Vixen Super Polaris Montierung (SPM) rum. Nachdem ich schnellere Motoren an eine GP-DX gebaut hatte, kam die Idee auf, dass man diese Montierung auch mit Motoren versehen könnte. Dann könnte man diese Montierung wieder nutzen. Die Kurzanleitung für die fertige Montierung befindet sich hier.
Designüberlegungen
- Die SPM hat keine Prismenklemme. Das ist bei einem Vereinsgerät, welches verschiedene Instrumente tragen wird, jedoch erforderlich. Käuflich erhältliche Adapter funktionieren, haben aber den Nachteil, dass sie den Hebel zwischen Teleskop und DE-Achslager unnötig verlängern. Es ist also eine Prismenklemmung gesucht, die den Achsabstand nicht erhöht.
- Im ersten Ansatz sollten die Motoren einer GP-DX verwendet werden. Dafür muss eine Steuerung vorliegen. Meine nicht mehr benötigte OnStep würde genau diese Aufgabe erfüllen. Die Schwäche des OnStep-Konzeptes ist es, dass alle Parameter im Sourcecode konfiguriert werden. Das ist im Vereinseinsatz nicht unbedingt von Nachteil, verhindert es doch ein versehentliches „kaputtkonfigurieren“.
- Nach meiner Meinung ist ein langsames GoTo (80x war mit den alten GP-DX Motoren erreichbar) nicht praxistauglich. Es muss ein schnelleres GoTo realisiert werden.
- Die Motorverkabelung der OnStep erfolgt mit RJ-12 Steckern. Entsprechend ist ein Motor zu verwenden, der die Ströme nicht zu groß werden lässt.
Vorarbeiten
Zerlegen
Im ersten Schritt habe ich die SPM vollständig zerlegt und gereinigt. Das war nötig, weil die SPM bereits bei Zimmertemperatur verdächtig schwerfällig zu bewegen war. Das alte Fett erinnerte auch mehr an Honig als an Fett. 
 Die beiden Aufnahmen zeigen ein paar Details mit dem alten Fett.
Die beiden Aufnahmen zeigen ein paar Details mit dem alten Fett.
Reinigen

 Wie oben bereits bemerkt, war eine Generalreinigung der Montierung zwingend erforderlich. Dazu habe ich alle Teile in Petroleum gereinigt. Nach dem Reinigen hat die visuelle Inspektion erst mal keine Schäden erkennbar werden lassen. Insofern stand einer Aufbereitung nichts im Wege. Jetzt da die Einzelteile vorliegen kann man auch die Maße nehmen, die für die Konstruktion der neuen Teile erforderlich sind.
Wie oben bereits bemerkt, war eine Generalreinigung der Montierung zwingend erforderlich. Dazu habe ich alle Teile in Petroleum gereinigt. Nach dem Reinigen hat die visuelle Inspektion erst mal keine Schäden erkennbar werden lassen. Insofern stand einer Aufbereitung nichts im Wege. Jetzt da die Einzelteile vorliegen kann man auch die Maße nehmen, die für die Konstruktion der neuen Teile erforderlich sind.
Unrunde Schnecke
Leider habe ich beim Zusammenbauen festgestellt, dass die DE-Schnecke heftig unrund läuft. Vermutlich hat sie mal einen Schlag abbekommen. Bei den langen und brutal starren Verstellknöpfen die daran befestigt waren, kann man froh sein, dass die Schnecke nicht gleich abgebrochen ist. Wer ist eigentlich auf die Idee gekommen diese Dinger daran zu schrauben? Eine biegsame Welle hätte da Vorteile… Hier gibt es ein Video, das den Schlag der Welle zeigt.
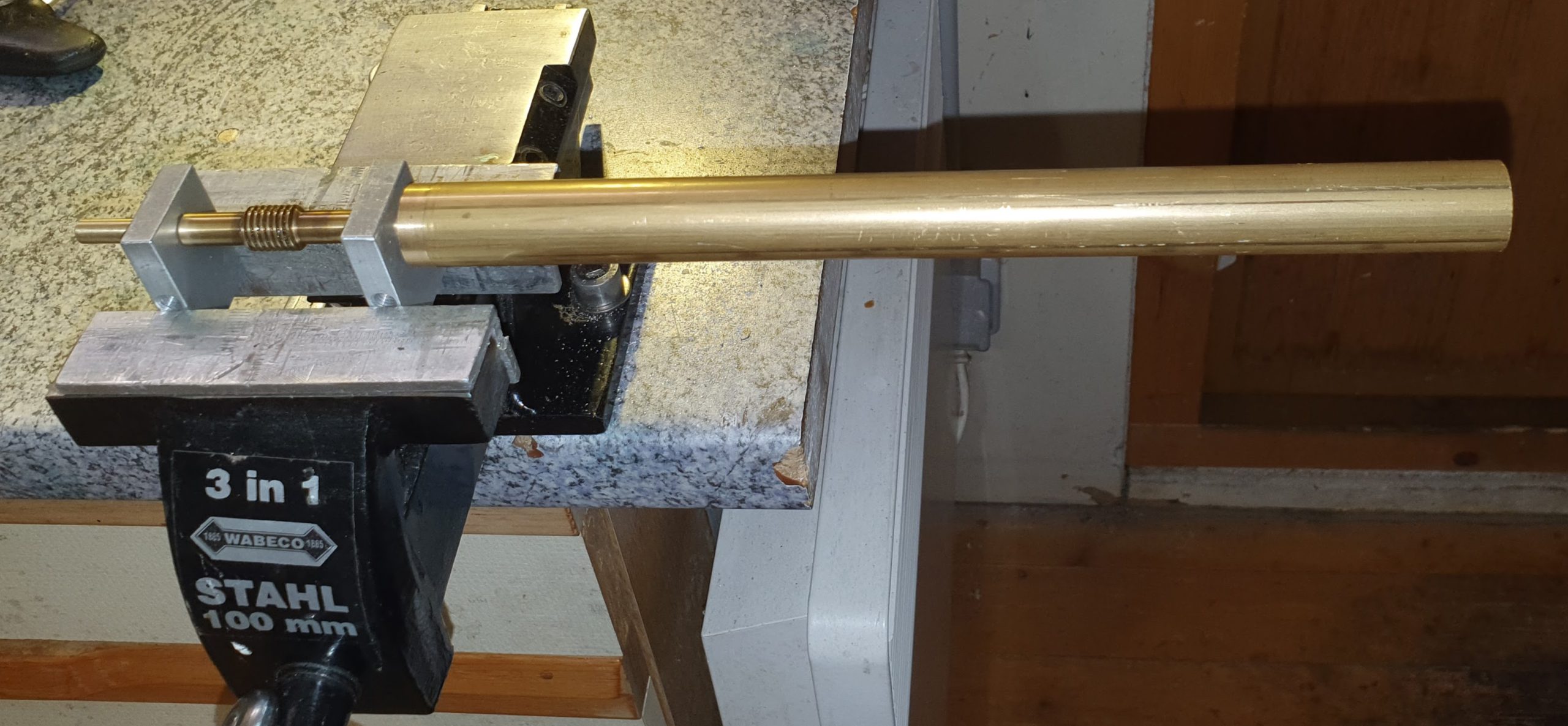 Ich habe mir dafür eine „Richtvorrichtung“ ausgedacht mit der ich die Welle vorsichtig (!) gerichtet habe. Jetzt ist immer noch ein Schlag drin, aber knapp unter einem Zehntel. Damit kann der Riemenantrieb allemal umgehen.
Ich habe mir dafür eine „Richtvorrichtung“ ausgedacht mit der ich die Welle vorsichtig (!) gerichtet habe. Jetzt ist immer noch ein Schlag drin, aber knapp unter einem Zehntel. Damit kann der Riemenantrieb allemal umgehen.
Teleskopadaption
Die neue Teleskopadaption mit einer Prismenschiene kann bei dieser SPM mit den mir zur Verfügung stehenden Werkzeugen recht einfach erfolgen. Grund ist die Tatsache, dass die Befestigung des DE-Motors noch nicht, wie bei späteren Modellen und auch allen GP-Montierungen, am Achsflansch erfolgt, sondern direkt an der DE-Achse. Der Nachteil ist, dass hier zusätzlich noch ein Motorhalter konstruiert werden muss.

Dieser Ansatz zeichnet sich dadurch aus, dass keinerlei Veränderungen an der SPM vorgenommen werden. Lediglich der originale Teleskopanschluss wird entfernt und durch die neue Konstruktion ersetzt. Ein Rückrüsten ist damit jederzeit ohne jegliche Spuren möglich.
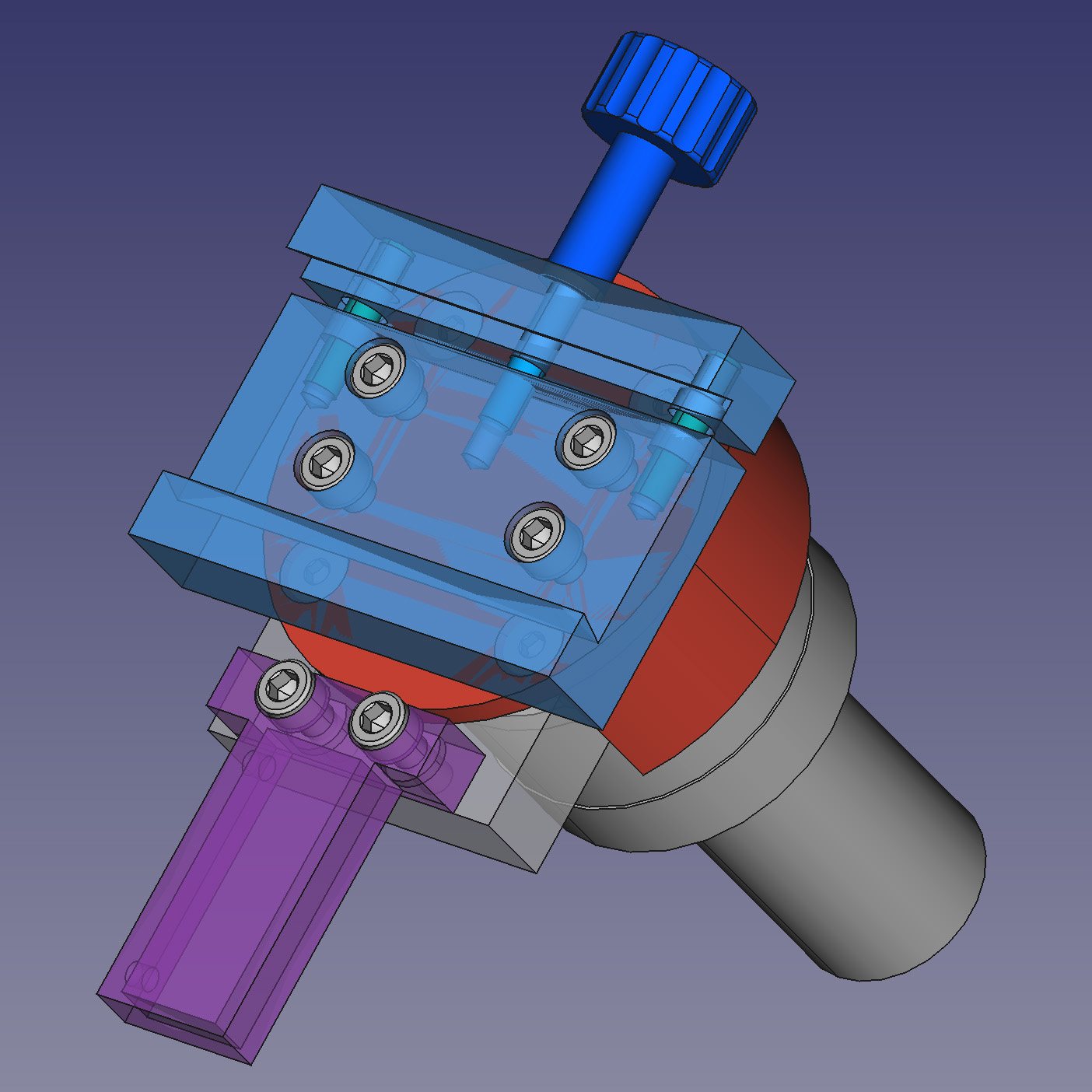
Das große Bild zeigt die Ansicht des neuen Teleskopanschlusses. Die originale DE-Achse ist in grau dargestellt. Die anderen Teile, die angefertigt angefertigt werden müssen, sind farbig dargestellt.
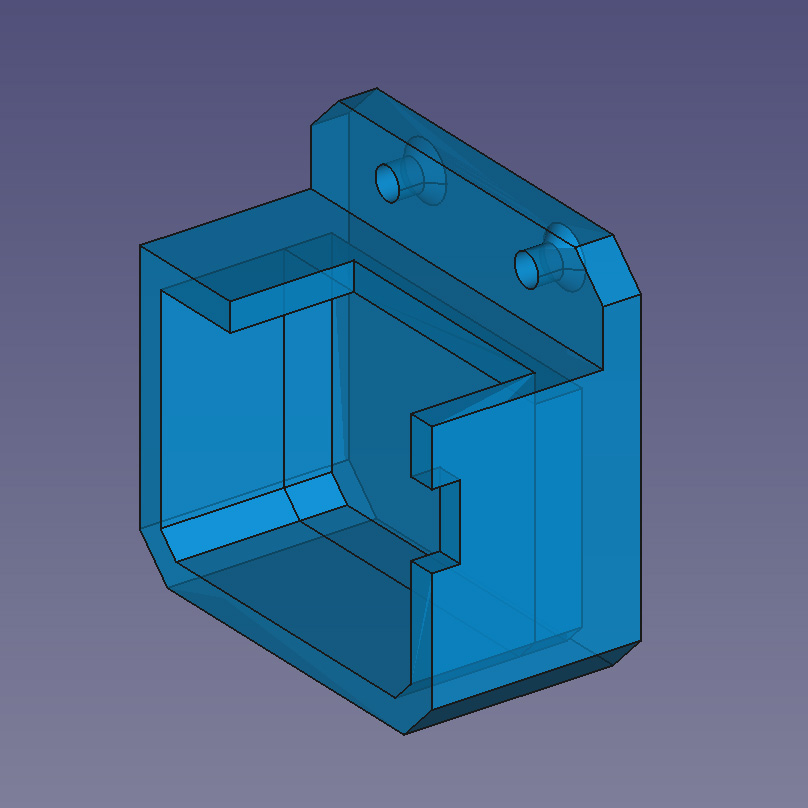
Deckel
Das kritischste Teil ist der in rot dargestellte Deckel. Er muss einerseits so genau gearbeitet werden, dass 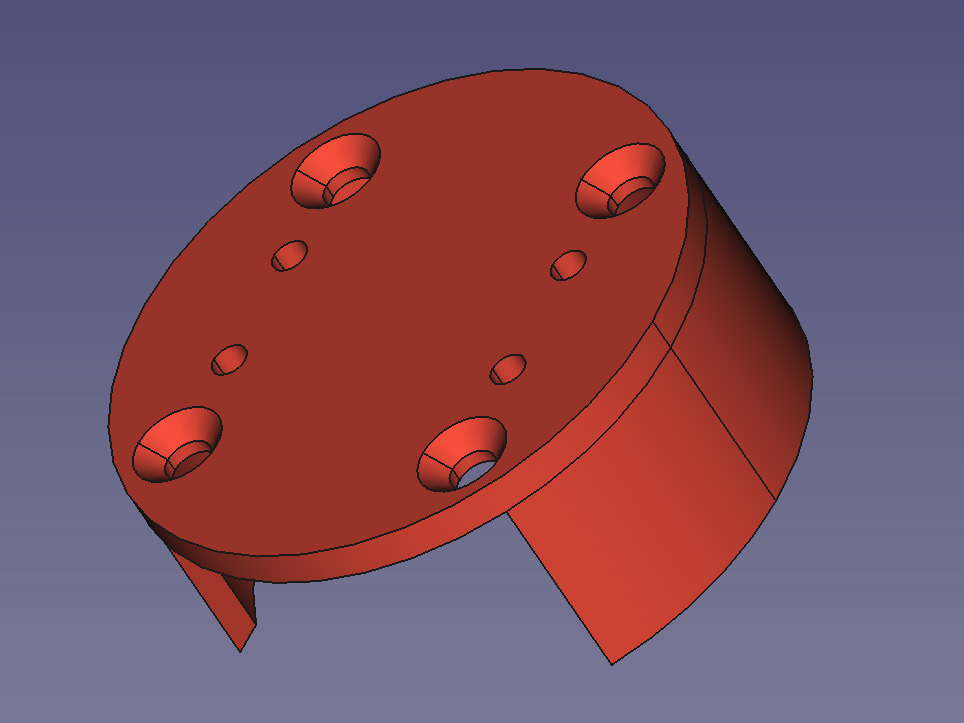 er sauber auf die SPM passt. Wenn hier etwas nicht passt, schleift es, oder es entstehen sogar Schäden an der SPM. Andererseits trägt der Deckel das Gewicht des Teleskops und nimmt die Prismenklemme auf. Deren Befestigungsschrauben müssen im Material halten. Zusätzlich soll gerade die Dicke des Bodens möglichst gering bleiben, weil hier jeder Millimeter den Hebel verlängert. Daher habe ich den Deckel aus hochfestem Aluminium gefertigt (AW-7075). Eine Zeichnung davon gibt es hier.
er sauber auf die SPM passt. Wenn hier etwas nicht passt, schleift es, oder es entstehen sogar Schäden an der SPM. Andererseits trägt der Deckel das Gewicht des Teleskops und nimmt die Prismenklemme auf. Deren Befestigungsschrauben müssen im Material halten. Zusätzlich soll gerade die Dicke des Bodens möglichst gering bleiben, weil hier jeder Millimeter den Hebel verlängert. Daher habe ich den Deckel aus hochfestem Aluminium gefertigt (AW-7075). Eine Zeichnung davon gibt es hier.
Prismenklemme
 Die Primenklemme könnte man einfach so kaufen. Hier handelt es sich aber um ein relativ angespanntes Design. Angespannt meint hier, dass es auf jeden Millimeter ankommt und die Dimensionen innerhalb recht enger Grenzen aufeinander abgestimmt werden müssen. Daher habe ich es vorgezogen eine genau passende Klemme zu bauen anstatt ein Kaufteil zu adaptieren, welches dann doch nicht zu 100% passt . Die Zeichnung gibt es hier.
Die Primenklemme könnte man einfach so kaufen. Hier handelt es sich aber um ein relativ angespanntes Design. Angespannt meint hier, dass es auf jeden Millimeter ankommt und die Dimensionen innerhalb recht enger Grenzen aufeinander abgestimmt werden müssen. Daher habe ich es vorgezogen eine genau passende Klemme zu bauen anstatt ein Kaufteil zu adaptieren, welches dann doch nicht zu 100% passt . Die Zeichnung gibt es hier.
Motoradaption
Motoradapter DE
Wie bereits erwähnt muss für diese SPM ein Halter für den DE-Motor konstruiert werden. Für den RA-Motor sind bereits Halterungen an der Montierung vorhanden. Ich habe mich dafür entschieden eine Befestigung kompatibel 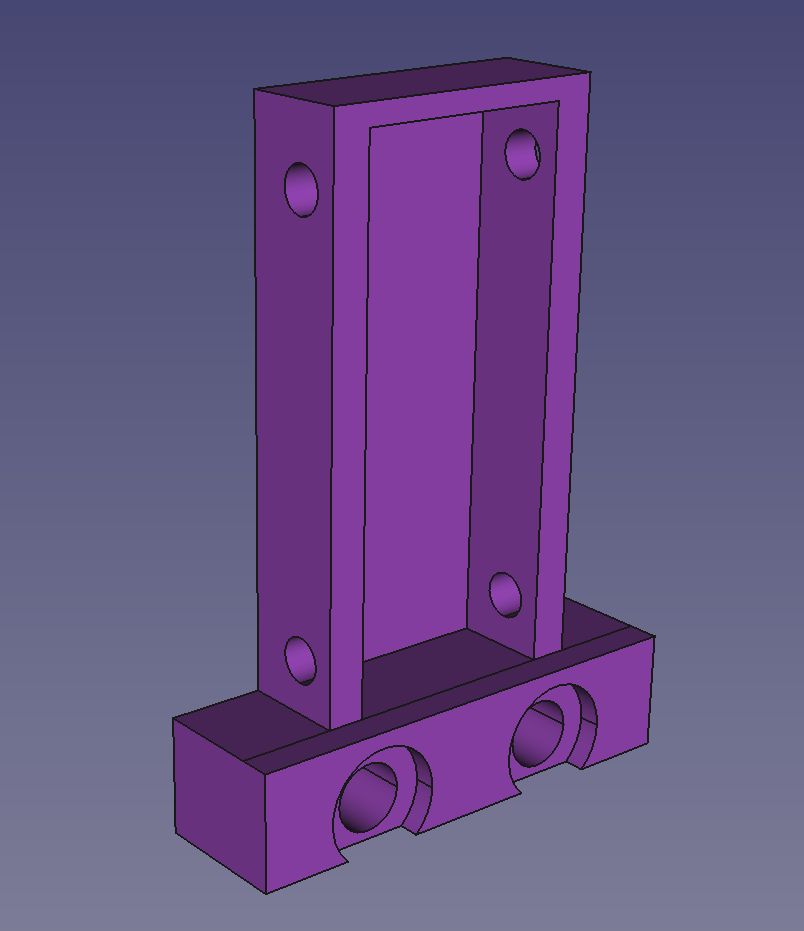 zur alten Vixen-Motorbefestigung zu bauen. Damit ist das System kompatibel zu den ursprünglich vorgesehenen GP-DX Motoren und die Befestigung von DE- und RA-Motor ist identisch. Um diese Anforderungen zu erfüllen habe ich das in der Abbildung dargestellte Teil konstruiert. Es kann dann direkt auf die originale DE-Achse geschraubt werden. Eine Zeichnung findet sich hier.
zur alten Vixen-Motorbefestigung zu bauen. Damit ist das System kompatibel zu den ursprünglich vorgesehenen GP-DX Motoren und die Befestigung von DE- und RA-Motor ist identisch. Um diese Anforderungen zu erfüllen habe ich das in der Abbildung dargestellte Teil konstruiert. Es kann dann direkt auf die originale DE-Achse geschraubt werden. Eine Zeichnung findet sich hier.
Riemenantrieb
 Der Riemenantrieb ist wieder einmal mein bewährtes System aus 6,35 mm MXL Komponenten. Mit den verwendeten Zahnriemenrädern mit 40 und 16 Zähnen ergibt sich eine 2,5-fache Untersetzung. Im Mädler Web-Shop kann man mit einen einfachen Tool alle Parameter berechnen.
Der Riemenantrieb ist wieder einmal mein bewährtes System aus 6,35 mm MXL Komponenten. Mit den verwendeten Zahnriemenrädern mit 40 und 16 Zähnen ergibt sich eine 2,5-fache Untersetzung. Im Mädler Web-Shop kann man mit einen einfachen Tool alle Parameter berechnen.
Motorlager
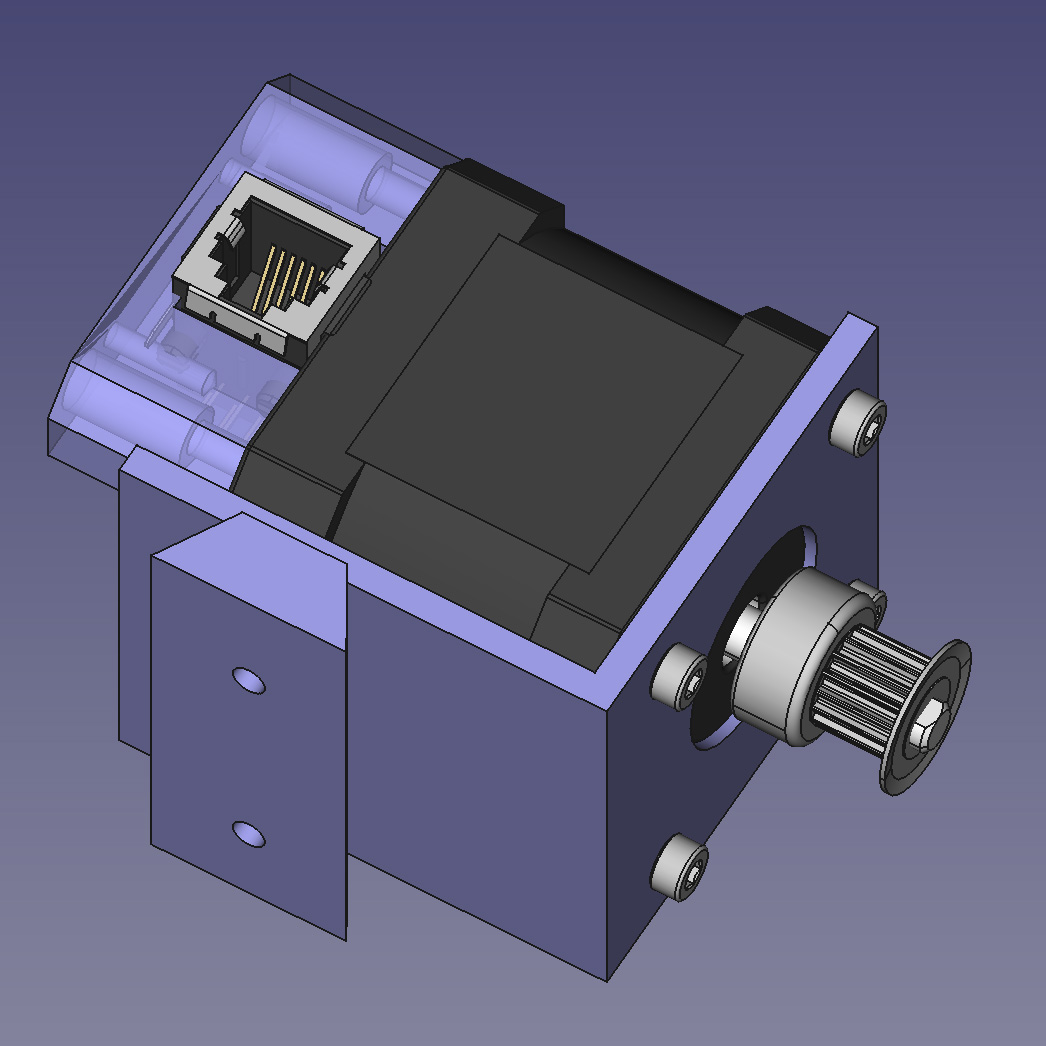 Die Befestigung der Motoren erfolgt über Aluprofile. Ich traue den einfachen 3D-Drucken aus PLA oder ABS hier nicht über den Weg. Da der Schwalbenschwanz schwierig zu fräsen ist, ist das Motorlager aus zwei Teilen gefertigt: dem Winkel selber, der die passenden Bohrungen für einen NEMA 17 Motor trägt und dem Prisma, welches in die Befestigungsvorrichtungen der SPM passt. Diese beiden Teile sind über zwei ISO 10642 Schrauben M4 x 8 verschraubt (Loctite Schraubensicherung nicht vergessen).
Die Befestigung der Motoren erfolgt über Aluprofile. Ich traue den einfachen 3D-Drucken aus PLA oder ABS hier nicht über den Weg. Da der Schwalbenschwanz schwierig zu fräsen ist, ist das Motorlager aus zwei Teilen gefertigt: dem Winkel selber, der die passenden Bohrungen für einen NEMA 17 Motor trägt und dem Prisma, welches in die Befestigungsvorrichtungen der SPM passt. Diese beiden Teile sind über zwei ISO 10642 Schrauben M4 x 8 verschraubt (Loctite Schraubensicherung nicht vergessen).
Hinten auf den Motor wird ein weiteres Aluteil gesetzt, welches die RJ-12 Buchse aufnimmt. Damit hat man schon eine solide Antriebseinheit und die Kabel sind ordentlich fixiert.
Motorabdeckung
 Damit die Elektrik besser von Umwelteinflüssen abgeschirmt wird, werden hinten noch zwei Deckel aus dem 3D-Drucker auf den Motor geschraubt. Damit bekommt das Ganze einen ordentlichen Abschluss. Die STL-Files gibt es hier.
Damit die Elektrik besser von Umwelteinflüssen abgeschirmt wird, werden hinten noch zwei Deckel aus dem 3D-Drucker auf den Motor geschraubt. Damit bekommt das Ganze einen ordentlichen Abschluss. Die STL-Files gibt es hier.
Motoren
Hier setze ich zwei Motoren von Stepperonline ein. Es handelt sich um den Typ 17HM15-0904S. Eine Wicklung hat 6 Ohm. Damit zieht er bei 5,4V einen Strom von 0,9A . So bleiben die Ströme noch im Rahmen. Da er einen Schrittwinkel von 0,9° hat, bietet er eine höhere Auflösung als 1,8° Motoren. Mit der OnStep und den RAPS128 Treibern erreicht man so eine theoretische Auflösung von 0,44 Bogensekunden am Himmel. Das reicht in der Praxis sicher aus, auch wenn diese Auflösung kaum erreicht werden wird. Im Vollschrittmodus kann ein Ardunino kann das GoTo mit 1800x steuern. Allerdings schaffen die Motoren das nur bei einem gut ausbalacierten System. Daher wird das System später mit „nur“ 1200x betrieben.

Das Excel-File als Berechnungsgrundlage zur Parametrisierung der OnStep gibt es hier.
Die fertige Super Polaris mit OnStep Steuerung
Die Abbildung zeigt die umgebaute SPM mit den schnellen Motoren und der OnStep-Steuerung bei ihrem „first light“, sofern man bei einer über 30 Jahre alten Montierung sowas sagen darf…
 GoTo-Geschwindigkeit
GoTo-Geschwindigkeit

Die GoTo-Geschwindigkeit des Systems beträgt 1200x. Das entspricht 5°/sec. Diese Geschwindigkeit wird über eine Rampe angesteuert. Das bedeutet, dass das Teleskop erst nach 10° Bewegung seine volle Geschwindigkeit erreicht. Ebenso beginnt es bereits 10° vor der Zielposition abzubremsen. Die Steuerung wäre mit den Motoren auch in der Lage 1800x (7,2°/sec) zu fahren. Diese Geschwindigkeit funktioniert jedoch nicht unter allen Bedingungen (starkes Ungleichgewicht, tiefe Temperaturen) sicher. Daher ist die Standardeinstellung der OnStep 1200x.
Sollte der Fall eintreten, dass auch 1200x zu Schrittverlusten führt, so kann zur Laufzeit die GoTo-Geschwindigkeit auf 75% oder 50% reduziert werden.
„Pointing-Genauigkeit“
In der Praxis reichen zwei Aligmentsterne aus, damit per GoTo Objekte der gesamten sichtbaren Hemisphäre in abgebildeten 70mm Refraktor bei 78-facher Vergrößerung sicher im Zentrum des Gesichtsfeldes stehen.
Test mit einem 6 Zoll Newtom
 Als weiteren Test habe ich eine 6″ Meade LXD75 auf die SPM geklemmt. Obwohl diese Gerät schon eine ordentliche Portion größer ist, ergibt sich eine solide Kombination. Allerdings reichen hier die beiden von Jürgen aufgetrieben Gegengewichte nicht mehr und ich musste noch ein Weiteres dazu packen.
Als weiteren Test habe ich eine 6″ Meade LXD75 auf die SPM geklemmt. Obwohl diese Gerät schon eine ordentliche Portion größer ist, ergibt sich eine solide Kombination. Allerdings reichen hier die beiden von Jürgen aufgetrieben Gegengewichte nicht mehr und ich musste noch ein Weiteres dazu packen.